
Soluţia Problemei Controlului Vitezei (de croazierǎ) (cruise control)
Controlul Proportional – P control
Controlul Proportional şi Integral - PI control
Controlul Proportional Integral si Derivativ - PID control
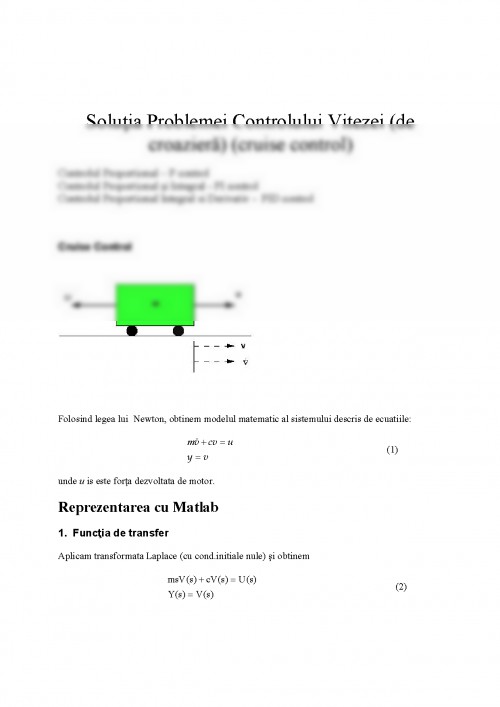
Cruise Control
Folosind legea lui Newton, obtinem modelul matematic al sistemului descris de ecuatiile:
unde u is este forţa dezvoltata de motor.
Reprezentarea cu Matlab
1. Funcţia de transfer
Aplicam transformata Laplace (cu cond.initiale nule) şi obtinem
Vom nota în continuare ieşirea V(s) cu Y(s) (notaţia de pâna acum pentru ieşire)
Rezultǎ funcţia de transfer
Este un exemplu simplu de sistem de ordinul unu. Acest model considera inerţia şi amortizarea. Pentru el vom determina în continuare controlere prin mai multe metode.
Pentru rezolvarea cu Matlab, scrieţi o m-file cu urmatoarele comenzi
m=1000;
c=50;
u=500;
num=[1];
den=[m c];
2. Modelul în Spatiul-Stǎrilor. Ecuaţiile de stare
Scriem ecuaţiile de ordinul întâi (1) în spatiul starilor
sau în forma echivalenta:
Matlab o nouǎ m-file:
m = 1000;
c = 50;
u = 500;
A = [-c/m];
B = [1/m];
C = [1];
D = 0;
UNIVERSITATEA „TRANSILVANIA” BRASOV
FACULTATEA: INGINERIE MECANICĂ
CATEDRA: AUTOVEHICULE ŞI MOTOARE
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.