
1.4. Expresii ale fortelor lagrangeene în convertoare electromecanice
-Câmpul intermediar de cuplaj, concentrare, stocare controlată şi conversie/transmitere a energiei, Wint(Wm, sau We)
-Forţă generalizată (lagrangeană), f de translaţie, F sau cuplu, M.
-Coordonată generalizată, x liniară, x sau unghiulară,
-Conversia electromecanică: SEM admite - f, x, dx, L=f dx, Wint =f(x)
-Utilizarea principiilor diferenţiale:-se obţine expresia forţei generalizate aplicând
-legea consevării energiei
-principiul deplasărilor virtuale şi a lucrului mecanic virtual:
pp.: dt, f, dx,( coord.geom xi =const., i=1 n-1, variab. el.-mag. = const.), L=f dx=dWmec,
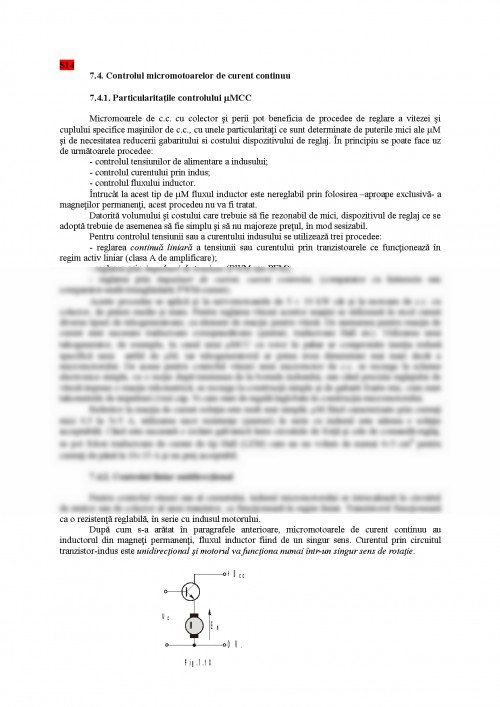
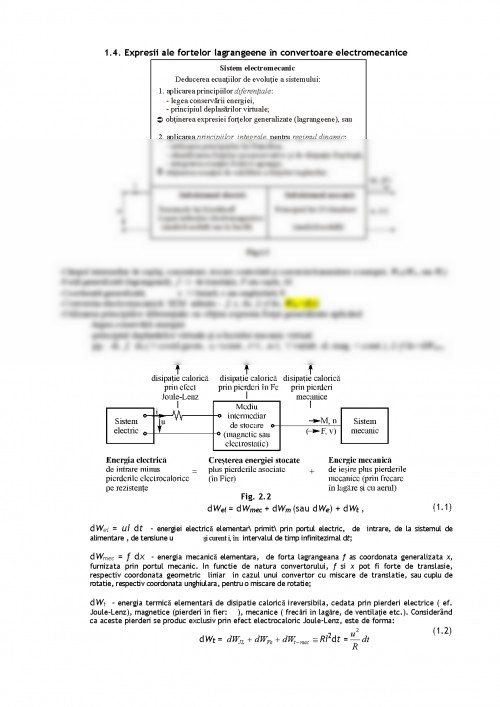
Fig. 2.2
dWel = dWmec + dWm (sau dWe) + dWt , (1.1)
dWel = ui dt - energiei electrică elementar primit prin portul electric, de intrare, de la sistemul de alimentare , de tensiune u şi curent i, în intervalul de timp infinitezimal dt;
dWmec = f dx - energia mecanică elementara, de forta lagrangeana f as coordonata generalizata x, furnizata prin portul mecanic. In functie de natura convertorului, f si x pot fi forte de translasie, respectiv coordonata geometric liniar in cazul unui convertor cu miscare de translatie, sau cuplu de rotatie, respectiv coordonata unghiulara, pentru o miscare de rotatie;
dWt - energia termică elementară de disipatie calorică ireversibila, cedata prin pierderi electrice ( ef. Joule-Lenz), magnetice (pierderi în fier: ), mecanice ( frecări în lagăre, de ventilaţie etc.). Considerând ca aceste pierderi se produc exclusiv prin efect electrocaloric Joule-Lenz, este de forma:
dWt = Ri2dt =
(1.2)
dWm (respectiv dWe) - variatia elementara a energiei interne, stocate in câmp magnetic (respectiv electrostatic).
1. In cazul unei structuri miniaturale, , cu câmp magnetic
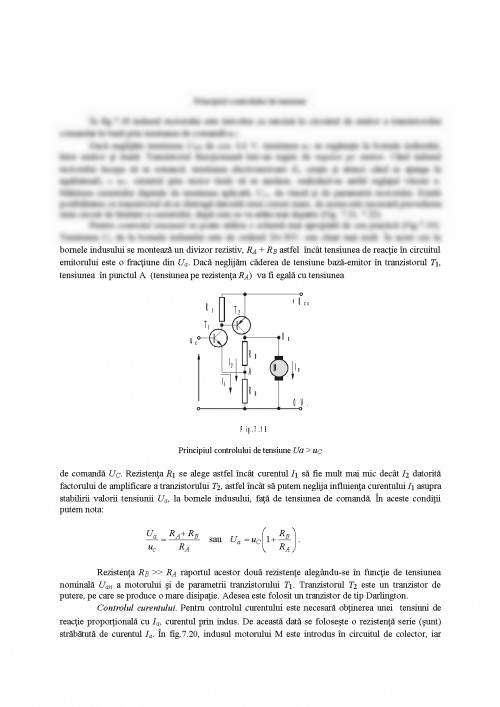
Fig.2.3 Pentru câmpul magnetic relatia generală a energiei şi coenergiei:
, (1.3)
pentru sistemele liniare :
= Li, (1.4)
. (1.5)
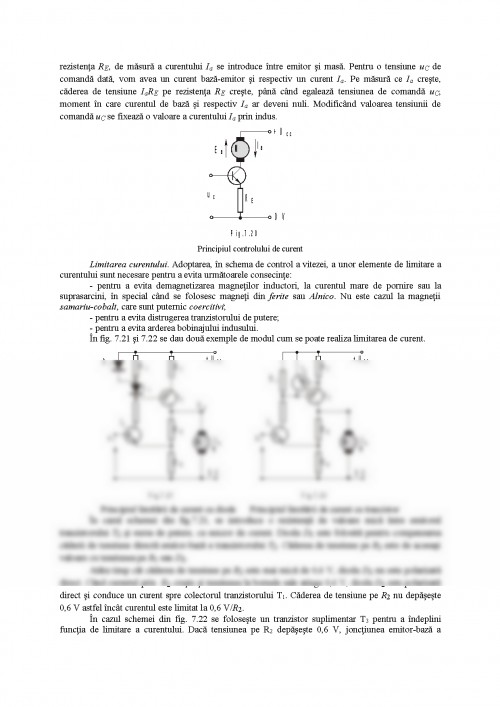
Fig.2.4
Legea conducţiei, Ohm, amplificată cu idt :
u - d /dt = Ri sidt
unde : R - rezistenta electrica echivalenta si - fluxul magnetic total al circuitului electric asociat portului de intrare.
dWel = uidt = Ri2dt + id, (1.6)
Din (1.1):
dWel = Ri2dt +fm dx + dWm ,
Rezultă:
fm dx = id dWm
(1.7)
Variabilele i si sunt corelate printr-o rela]ie neliniara, corespunzator curbei din figura 1.3 b, sau liniara de tipul relatiei (1.3). Teoretic, dependentele (i), repectiv i() se pot cunoaste.
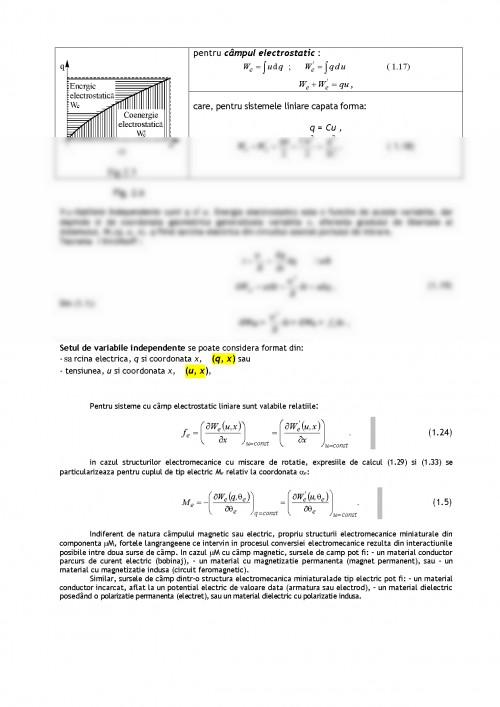
Setul de variabile independente in functie de care se poate exprima energia magnetica Wm poate fi format din:
a) fluxuri si coordonata geometrica generalizata, (, x), sau
b) curen]i si coordonata geometrica generalizata, (i, x).
Relatia de determinare a fortei legrangeene se poate obtine folosind fie expresia energiei magnetice Wm, direct fie expresia sa funcţie de coenergia magnetică prin rela]ia (1.3), in forma: (1.8)
2.In cazul structurii electromecanice miniaturale cu câmp electric
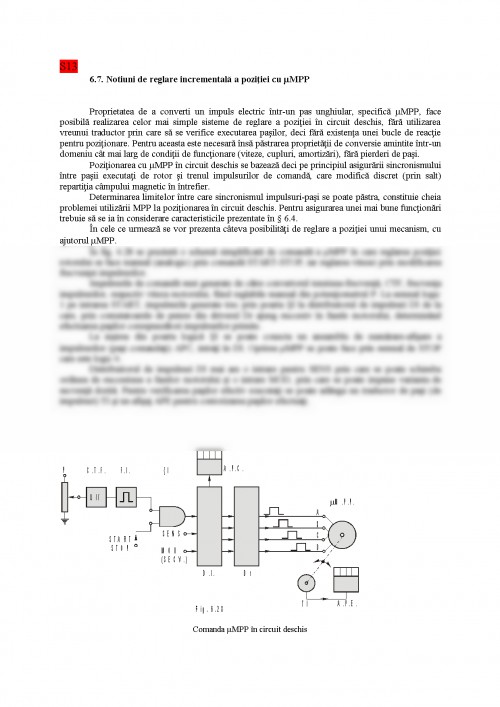
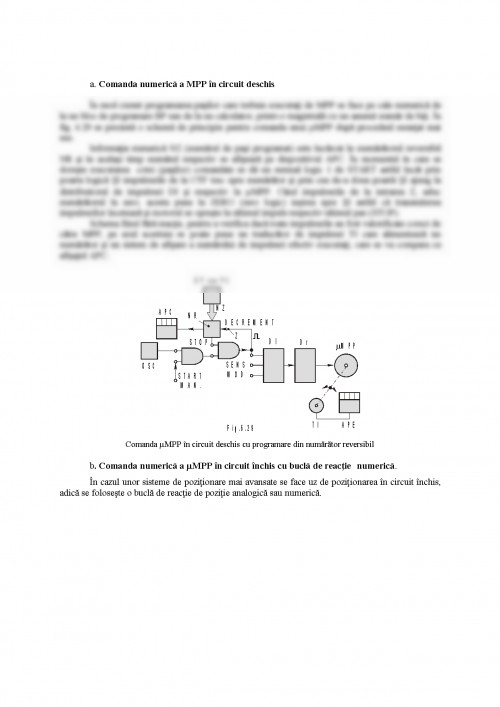
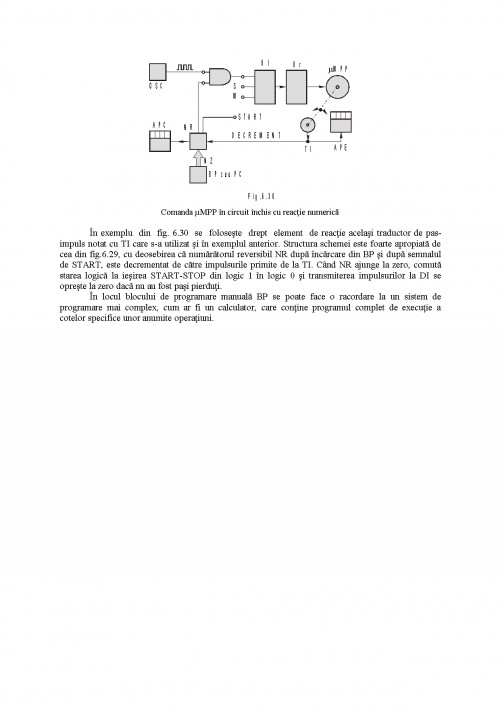
6.3.1. Micromotorul pas cu pas cu rotor activ, MPP-MP
Micromotorul pas cu pas cu rotorul magnetizat este similar unei maşini sincrone cu excitaţie pe rotor. Dacă magnetul permanent se realizează astfel încât la rotirea rotorului să nu se producă variaţii de reluctanţă a circuitului magnetic aferent unei faze a statorului, atunci inductivitatea înfăşurării de fază este independentă de poziţia rotorului şi este relativ constantă. Această situaţie se exprimă prin Ld = Lq, raportul a = Ld/Lq devine a = 1 şi în consecinţă, relaţia (6.2.b) se reduce la:
, (6.4)
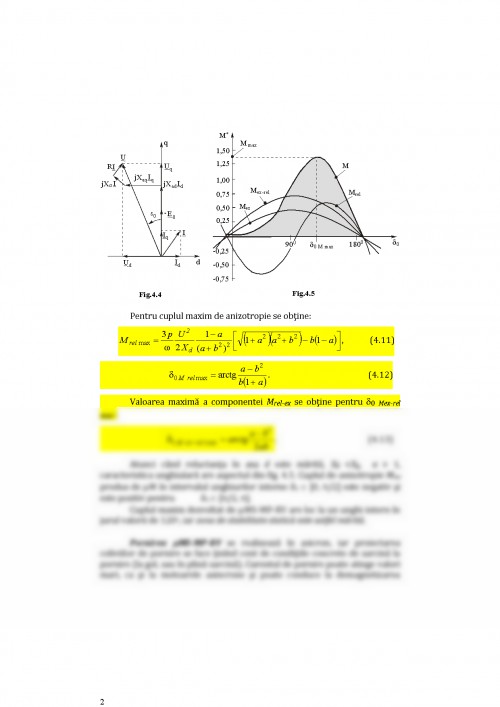
numit cuplu de excitaţie sau magnetoelectric, în care: - MP este fluxul magnetului permanent; - I este curentul de comandă în faza activată; - este unghiul între axa magnetului (axa “d” a rotorului) şi axa înfăşurării activate (solenaţiei) respectiv unghiul între fazorii spaţio-temporali MP şi I.
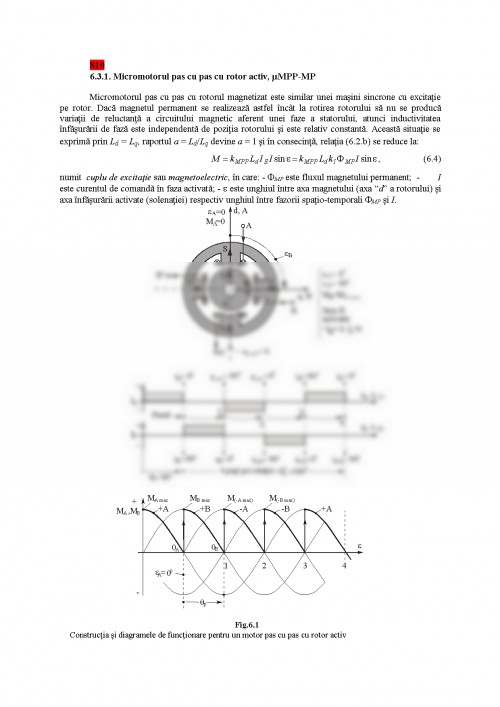
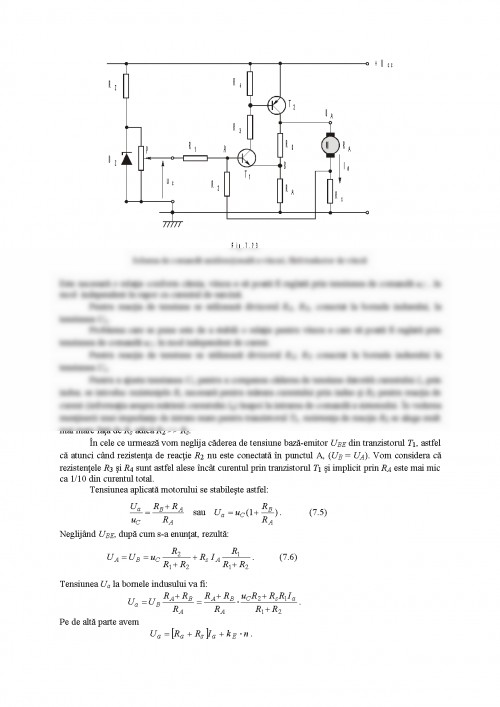
Construcţia şi diagramele de funcţionare pentru un motor pas cu pas cu rotor activ
MPP-MP; 4 paşi/rot.
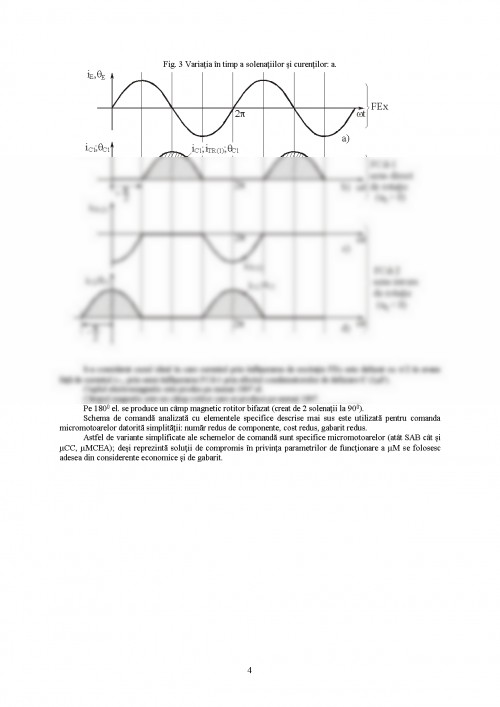
În figura 6.1 se prezintă structura unui motor elementar cu rotor activ bipolar, Zr=2pr=2 şi două faze statorice de comandă, (A, B), m=2 formate prin înserierea adiţională a înfăşurărilor de pe polii diametral opuşi, Zs=2ps=4; se prezintă de asemenea diagramele de succesiune a curenţilor în cele două faze, cât şi caracteristicile cât şi caracteristicile cuplurilor funcţie de unghiul , MA() şi MB().
Se remarcă faptul că pentru a se produce un cuplu pozitiv (în sensul dorit de rotaţie) la fiecare tact (în fiecare secvenţă) impulsurile de curent trebuie să fie bipolare: bobinajele sunt parcurse de curent succesiv într-un sens (de exemplu AA', respectiv BB') şi în sens opus (A'A respectiv B'B) prin schimbarea polarităţii curentului de alimentare.
Considerând rotorul cu axa d aliniată cu axa AA' a fazei A şi curentul IA = 0, dacă se comandă faza B cu un curent +IB, (ca în fig.6.1) cuplul care acţionează asupra rotorului este maxim. Într-adevăr, în această situaţie, =90o şi respectiv, sin90o=1.
Pe diagramele M() din partea inferioară a fig. 6.1, momentul de aliniere, menţionat mai sus, este reprezentat de punctul stabil de repaos OA. În momentul activării fazei B funcţionarea trece din OA în MB max şi apoi B tinde spre zero, în noul punct de aliniere OB de cuplu MB nul. Nu s-a ţinut cont de existenţa unui cuplu rezistent, deci se consideră funcţionarea la gol ideal, fără frecări.
Unghiul de pas p, pentru motorul cu rotor activ bipolar, Zr=2pr = 2 , având m = 2 faze, este p=90o obţinându-se în mod corespunzător, 4 paşi/ rotaţie. Motorul cu rotor activ poate funcţiona cu un număr minim de faze m = 2, iar unghiul pentru care se obţine valoarea maximă a cuplului este =90o.
Anticipăm, pentru comparaţie, că la motorul cu rotor inactiv (MPP-RV), unghiul de cuplu maxim, este =45o şi în consecinţă, la Zr = 2pr = 2 se obţin 8 paşi/rotaţie.
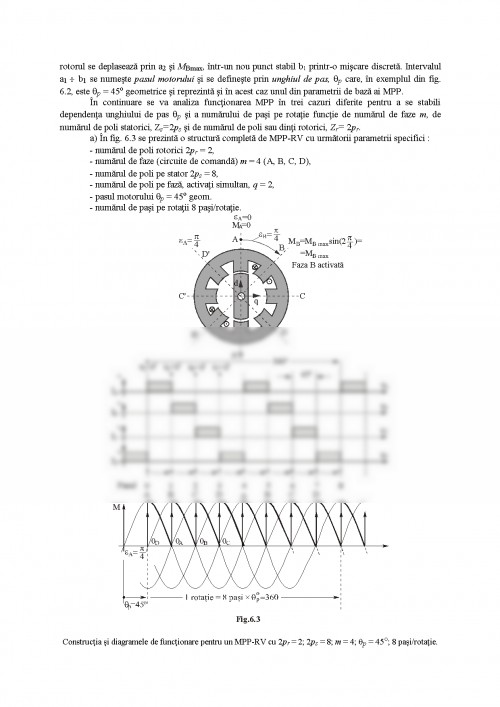
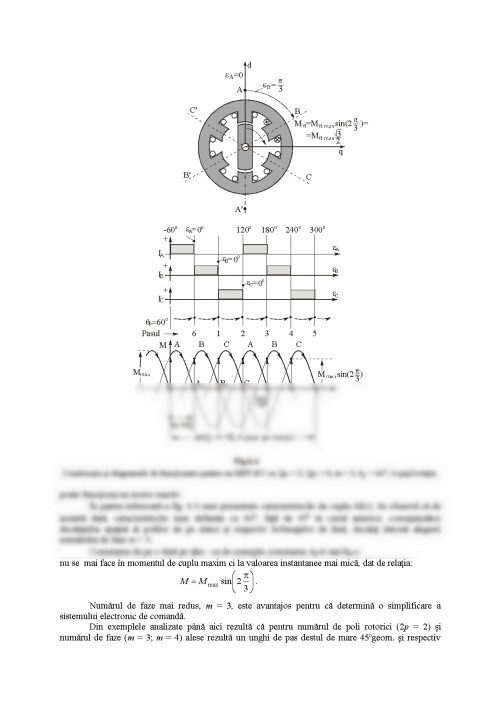
6.3.2. Micromotorul pas cu pas cu reluctanţă variabilă, MPP-RV
La micromotorul pas cu pas reactiv, atât statorul cât şi rotorul sunt confecţionate din tole de ferosiliciu. Configuraţia geometrică este astfel constituită încât la deplasarea rotorului faţă de stator, reluctanţa circuitului magnetic să se modifice foarte mult. Când axa d a rotorului (fig. 6.2), coincide cu axa a unui pol statoric - de exemplu A-A', reluctanţa circuitului magnetic este minimă; se realizează poziţia “de aliniere”.
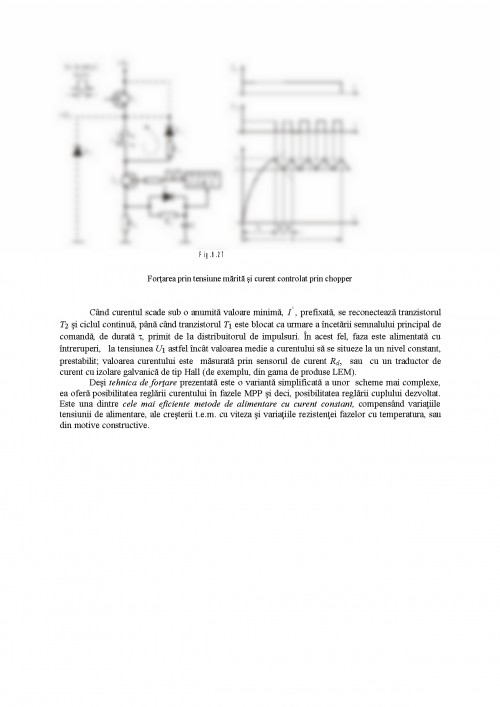
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.