I. NOTIUNI GENERALE
1.1 Definitia Traductorului
Traductorul este elementul care permite convertirea unei marimi fizice (de obicei neelectrica) într-o alta marime (de obicei electrica) dependenta de prima, în scopul introducerii acesteia într-un circuit de automatizare. Informaţia furnizată de traductor nu se adresează unui operator uman, ci unui echipament de conducere sau reglare automată.
Din punct de vedere al caracteristicilor, este necesar ca traductoarele sa aiba o relaţie de dependenţă liniară între intrare şi ieşire (I - E) si o dinamică proprie care să nu influenţeze în mod esenţial comportarea Sistemelor de Reglare Automata (SRA).
Informaţia furnizată de traductor către echipamentul de conducere trebuie să ajungă fără întârziere, pentru ca deciziile de conducere să fie oportune. Astfel, trebuie ca dinamica proprie a traductorului să fie rapidă iar programarea informaţiei prin traductor să se realizeze cu întârzieri minime, neglijabile în raport cu dinamica procesului condus.
1.2 Poziţia traductoarelor în cadrul S.R.A.
In figura i.1 este prezentata schema structurală a unui sistem monovariabil de reglare automata.
Fig. i.1 – Schema de principiu a unui SRA monovariabil
Din aceasta schema se poate observa că traductorul este plasat pe calea de reacţie, având la intrare mărimea reglată (y), pe care o converteşte (o traduce) în mărime de reacţie (yr ). Mărimea de reacţie, însumată cu referinţa (r), determină eroarea de reglare () conform relaţiei:
(i.2)
În cazul unui sistem multivariabil de reglare şi/sau conducere automată schema de principiu este de tipul celei din figura i.2.
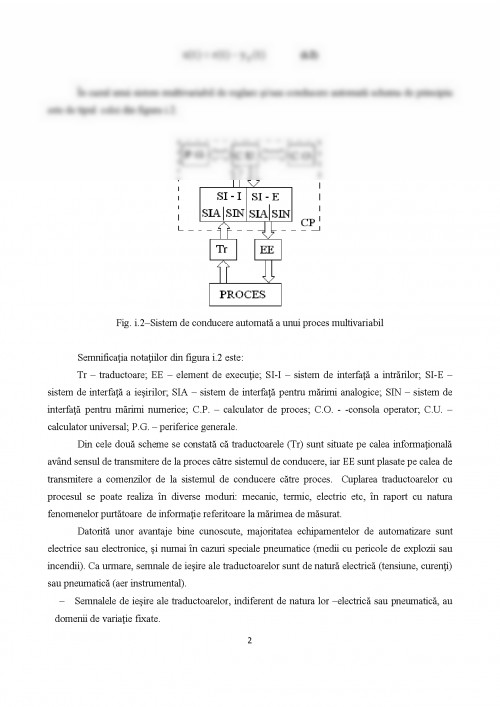
Fig. i.2–Sistem de conducere automată a unui proces multivariabil
Semnificaţia notaţiilor din figura i.2 este:
Tr – traductoare; EE – element de execuţie; SI-I – sistem de interfaţă a intrărilor; SI-E – sistem de interfaţă a ieşirilor; SIA – sistem de interfaţă pentru mărimi analogice; SIN – sistem de interfaţă pentru mărimi numerice; C.P. – calculator de proces; C.O. - -consola operator; C.U. – calculator universal; P.G. – periferice generale.
Din cele două scheme se constată că traductoarele (Tr) sunt situate pe calea informaţională având sensul de transmitere de la proces către sistemul de conducere, iar EE sunt plasate pe calea de transmitere a comenzilor de la sistemul de conducere către proces. Cuplarea traductoarelor cu procesul se poate realiza în diverse moduri: mecanic, termic, electric etc, în raport cu natura fenomenelor purtătoare de informaţie referitoare la mărimea de măsurat.
Datorită unor avantaje bine cunoscute, majoritatea echipamentelor de automatizare sunt electrice sau electronice, şi numai în cazuri speciale pneumatice (medii cu pericole de explozii sau incendii). Ca urmare, semnale de ieşire ale traductoarelor sunt de natură electrică (tensiune, curenţi) sau pneumatică (aer instrumental).
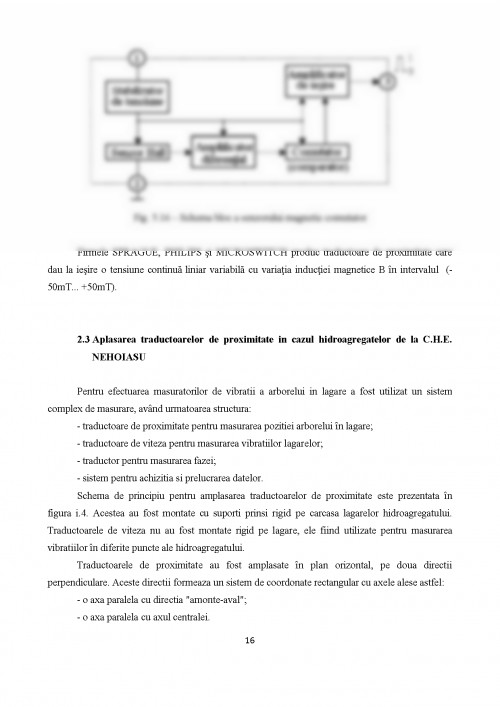
- Semnalele de ieşire ale traductoarelor, indiferent de natura lor –electrică sau pneumatică, au domenii de variaţie fixate.
- În acest mod se crează posibilitatea utilizării de echipamente tipizate, realizându-se aşa-numitele sisteme unificate de aparate pentru automatizare.
1.3 Structura generală a unui traductor
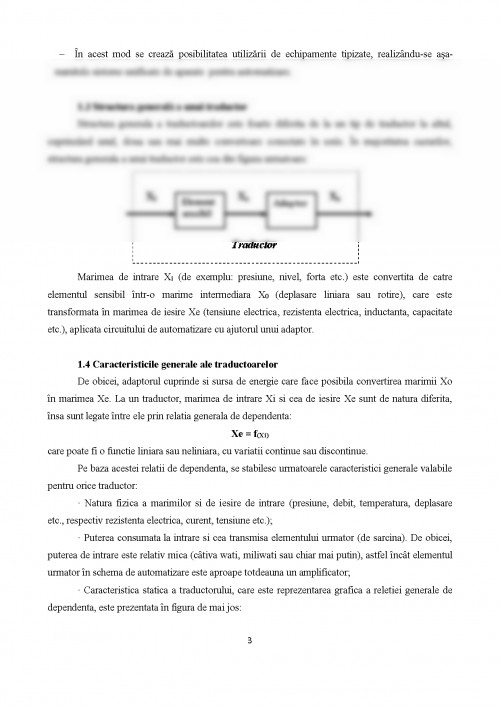
Structura generala a traductoarelor este foarte diferita de la un tip de traductor la altul, cuprinzând unul, doua sau mai multe convertoare conectate în serie. În majoritatea cazurilor, structura generala a unui traductor este cea din figura urmatoare:
Marimea de intrare Xi (de exemplu: presiune, nivel, forta etc.) este convertita de catre elementul sensibil într-o marime intermediara X0 (deplasare liniara sau rotire), care este transformata în marimea de iesire Xe (tensiune electrica, rezistenta electrica, inductanta, capacitate etc.), aplicata circuitului de automatizare cu ajutorul unui adaptor.
1.4 Caracteristicile generale ale traductoarelor
De obicei, adaptorul cuprinde si sursa de energie care face posibila convertirea marimii Xo în marimea Xe. La un traductor, marimea de intrare Xi si cea de iesire Xe sunt de natura diferita, însa sunt legate între ele prin relatia generala de dependenta:
Xe = f(Xi)
care poate fi o functie liniara sau neliniara, cu variatii continue sau discontinue.
Pe baza acestei relatii de dependenta, se stabilesc urmatoarele caracteristici generale valabile pentru orice traductor:
• Natura fizica a marimilor si de iesire de intrare (presiune, debit, temperatura, deplasare etc., respectiv rezistenta electrica, curent, tensiune etc.).
Tema de casa BSA - Traductoare de proximitate
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.