Protocolul CAN este utlizat pentru comunicaţii seriale.
Există două formate de mesaje, cel „standard”, pe 11 biţi şi cel „extins”, pe 29 de biţi.
Specificaţiile CAN contrau din 2 părţi:
• Partea A, care e definit ca Specificaţia CAN 1.2
• Partea B, mesajul “standard” şi “extins”
Ca sa fie comaptibil cu Specificaţia CAN 2.0, CAN-ul trebuie sa implementeze atât Partea A cât şi Partea B.
Partea A
1. Introducere
Controller Area Network (CAN) este un protocol de cumunicaţie serială, care supsortă control în timp real şi securitate foarte mare. Se utlizează în domeniul automotive, în special al engine control unit si senzori. Are o rată de transfer de 1Mbit/s.
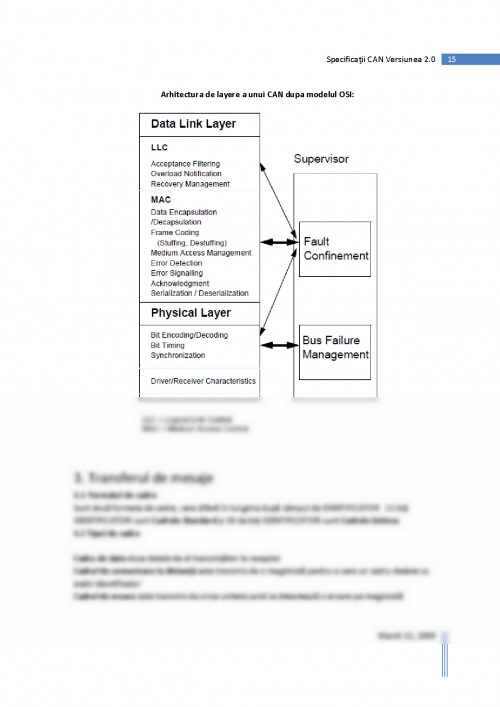
CAN-ul a fost divizat în următoarele layere:
• layerul de obiect CAN
• layerul de transfer CAN
• layerul fizic
2. Concepte elementare
Proprietăţi:
• prioritizare mesajelor
• garanţia timpilor de latenţă
• flexibilitatea configutaţiei
• recepţie multicast cu sincronizare timp
• cossitenţă de dată larga de sistem
• multimaster
• detecţie de erori si semnalizare
• retransmitere automată a mesajelor corupte in clipa cnad bus+ul de transmisie e pe asteptare
• distincţie dintre erori temporare şi greseli permanente ale nodurilor şi deconectare automată de la noduri defecte
Structura cu layere a unui nod CAN:
Probalilitatea erorii pentru coduri corupte nedetectate este mai mică ca:
message error rate * 4.7 * 10-11
3. Transferul de mesaje
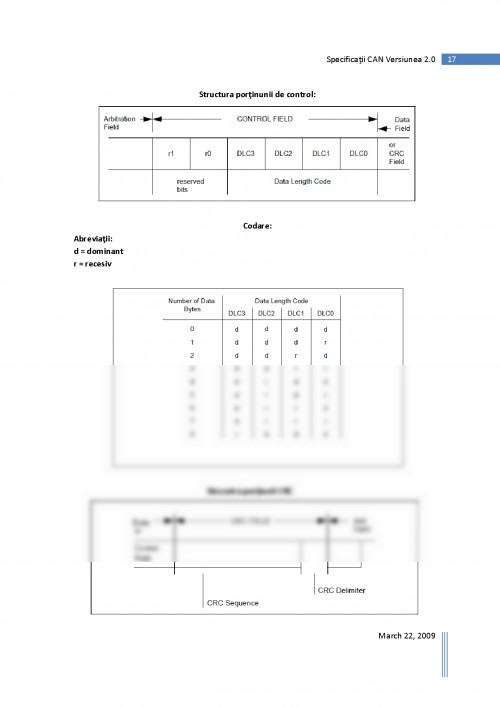
3.1 Tipul de cadre
Cadru de date duce datele de al transmiţător la receptor
Cadrul de comunicare la distanţă este transmis de o magistrală pentru a cere un cadru dedate cu acelsi identificator
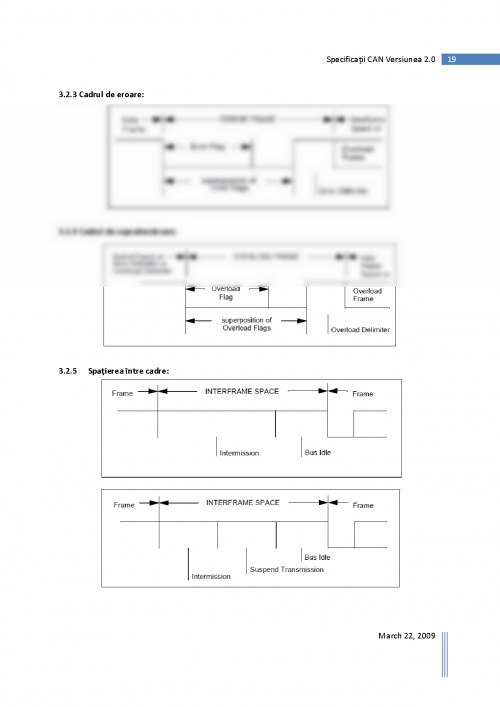
Cadrul de eroare este transmis de orice unitate cand se detectează o eroare pe magistrală
Cadrul de supraîncărcare este ultilizat pentru a crea un timp de aşteptare (delay) extra între cadruri de date sau de comincare la distanţă
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.