Generalitati
O definitie riguroasa a notiunii de sistem este inca greu de dat, nefiind precizat
genul proxim fata de care notiunea sa-si puna in evidenta apartenenta. Sunt cu-noscute
mai multe definitii. Una dintre acestea precizeaza ca sistemul este un model fizic
realizabil al unui ansamblu de obiecte naturale sau create artificial in care unele marimi
reprezinta cauza, iar altele efectul.
Conceptul de sistem este strâns legat de conceptul de structura, structuralitatea
putând fi definita, intr-o prima abordare, drept capacitatea de organizare a obiectelelor si
fenomenelor, de sinteza a acestora in complexe omogen structura-le.
Structuralitatea, alaturi de alte atribute universale cum ar fi miscarea, interactiunea
etc., este o insusire universala a materiei.
Notiunea de sistem privita la diferite nivele mai particulare poate explica obi-ectele
unei clase oarecare care definesc diferite domenii disciplinare. Asa este cazul notiunii de
sistem dinamic care se asociaza categoriei filosofice de cauzalitate. Punctul de plecare l-a
constituit notinea de cutie neagra „black-box“ ale carei ter-minale (legaturi cu exteriorul)
pun in evidenta atât legatura dinspre exterior si interior (cauza) cât si aceea dinspre
interior spre exterior (efectul) conform fig.
Fig1.1
Cauzalitatea creaza o orientare naturala a obiectului, numita intrare – iesire.
Conceptul de sistem dinamic presupune un sistem la care variabila independenta esentiala
este timpul. Se cere insa ca legatura cauzala dintre intrare si iesire sa fie neanticipativa,
adica efectul sa fie precedat de cauza.
Astfel, daca sistemul are o variabila de iesire y si o variabila de intrare u, vom
defini sistemul ca un model fizic realizabil al dependentei variabilei y de variabila u, cu
conditia de cauzalitate indeplinita u y (si nu exista cauzalitatea y u).
Sisteme automate
Sistemul automat reprezinta reuniunea a doua subsisteme: instalatia tehno-logica
(IT) sau procesul automatizat si dispozititvul de automatizare (DA) care sta-bileste legea
sau algoritmul de conducere a procesului, dupa un program presta-bilit.
Marimile care intervin in cadrul unui sistem automat inchis sunt conform fig. 1.2.
r – marimea de referinta sau programul prescris sistemului
u – marimea de comanda sau de conducere a procesului
y – marimea reglata sau de iesire
yr – marimea de reactie principala
pi – marimi perturbatoare
Fig1.2
Esentiala la sistemele automate cu circuit inchis este prezenta reactiei principale
(legatura inversa) dintre procesul automatizat si dispozitivul de automatizare. Reactia
aduce permanent la cunostinta dispozitivului de automatizare informatii cu privire la
valoarea marimii de iesire y.
In absenta acestor informatii, pe baza carora dispozitivul de automatizare ia decizii,
sistemul in ansamblu nu poate realiza corelatia dorita r y, ca urmare a prezentei
marimilor perturbatoare pi. Acestea din urma se datoresc:
– sarcinilor variabile cu care lucreaza procesul automatizat (tehnologic);
– influentei factorilor externi asupra elementelor;
– variatiei parametrilor mediului ambiant;
– uzurii si procesului de imbatrânire a elementelor.
In practica industriala se intâlnesc si sisteme cu comenzi in circuit deschis,
respectiv sisteme fara reactie. La un asemenea sistem nu se controleaza daca comanda
data a fost realizata.
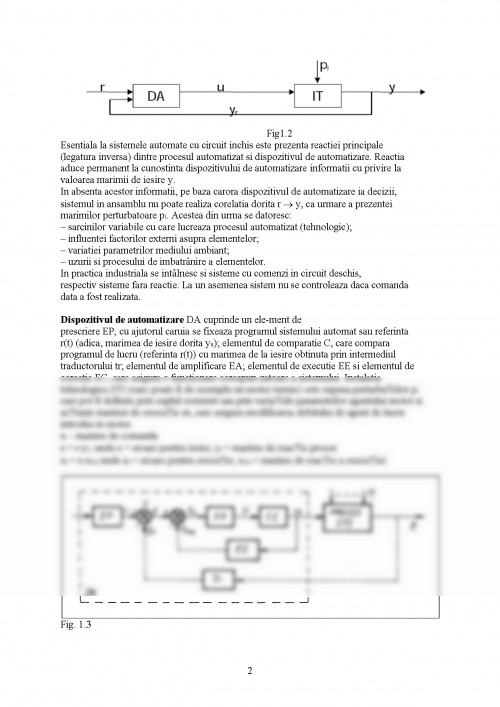
Dispozitivul de automatizare DA cuprinde un ele-ment de
prescriere EP, cu ajutorul caruia se fixeaza programul sistemului automat sau referinta
r(t) (adica, marimea de iesire dorita ya); elementul de comparatie C, care compara
programul de lucru (referinta r(t)) cu marimea de la iesire obtinuta prin intermediul
traductorului tr; elementul de amplificare EA; elementul de executie EE si elementul de
corectie EC, care asigura o functionare corespun-zatoare a sistemului. Instalatia
tehnologica (IT) (care poate fi de exemplu un motor termic) este supusa perturbaTiilor pi
care pot fi definite prin cuplul rezistent sau prin variaTiile parametrilor agentului motor si
acTiunii marimii de execuTie m, care asigura modificarea debitului de agent de lucru
introdus in motor.
u – marime de comanda
= r-yr; unde = eroare pentru iesire; yr = marime de reacTie proces
n = -xms unde n = eroare pentru execuTie; xms = marime de reacTie a execuTiei
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.