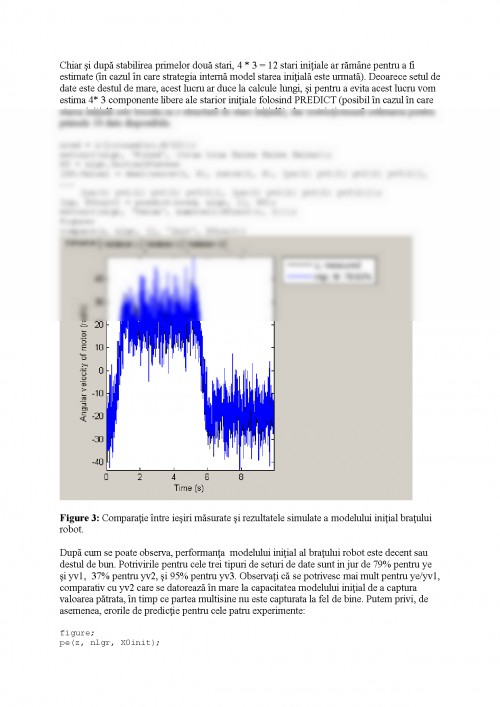

Brat Robot Industrial
Braţul robot industrial investigat în acest studiu de caz este descris de un model neliniar flexibil în conformitate cu figura 1. Acest model este idealizat în sensul că mişcările se presupun a fi in jurul unei axe care nu sunt afectate de gravitaţie. Pentru simplitate si modelare este efectuat cu un raport de transmisie r = 1 şi adevăratii parametri fizici sunt apoi obţinuti printr-o scalare directă cu raport de transmisie adevărat.
Figure 1: Schematic diagram of an industrial robot arm.
Modelarea braţului robot
Intrarea robotului este cuplul aplicat u(t) = Tau(t) generat de motorul electric, iar viteza unghiulară rezultată a motorului y(t) = d/dt q_m (t) este măsurată de ieşire. Poziţiile unghiulare ale pieselor după cutia de viteze şi la sfârşitul structurii braţului, q_g (t) şi q_a (t), sunt non-măsurabile. Flexibilitatea în cutia de viteze este modelată de un arc, descris de către tau_s(t), care este situat între motor şi a doua piesa. Frecarea sistemului acţionează în principal pe prima piesa şi aici este modelată de cuplul de frecare tau_f(t) neliniar.
Introducerea valorilor
( x1(t) ) ( q_m(t) - q_g(t) )
( x2(t) ) ( q_g(t) - q_a(t) )
x(t) = ( x3(t) ) = ( d/dt q_m(t) )
( x4(t) ) ( d/dt q_g(t) )
( x5(t) ) ( d/dt q_a(t) )
şi aplicarea cuplului pentru rezultatul celor trei piese rezulta în următoarea structură de model neliniar
d/dt x1(t) = x3(t) - x4(t)
d/dt x2(t) = x4(t) - x5(t)
d/dt x3(t) = 1/J_m*(-tau_s(t) - d_g*(x3(t)-x4(t)) - tau_f(t) + u(t))
d/dt x4(t) = 1/J_g*(tau_s(t) + d_g*(x3(t)-x4(t)) - k_a*x2(t) - d_a*(x4(t)-x5(t)))
d/dt x5(t) = 1/J_a*(k_a*x2(t) + d_a*(x4(t)-x5(t)))
y(t) = x3(t)
unde J_m, J_g si J_a sunt momentele de inertie lae motorului, cutia de viteze si structura brat, respectiv, d_g si d_a sunt parametrii de amortizare, si k_a este rigiditatea bratului.
Cuplul de frecare al cutiei de viteze, tau_f(t) este modelat sa includa mai multe fenomene de frecare intalnite in practica, pe langa alte lucruri numite frecarea Coulomb si efectul Stribeck:
tau_f(t) = Fv*x3(t) + (Fc+Fcs*sech(alpha*x3(t)))*tanh(beta*x3(t))
unde Fv si Fc sunt vascozitatile si coeficientii de frecare Coulomb, Fcs si alpha sunt coeficientii pentru reflectorizarea efectului Striebeck, si beta este un parametru folositg pentru a obtine o tranziţie lină de la negativ la pozitiv de viteze x3(t).
Cuplul arcului, tau_s(t), este presupus de a fi descris de un polinom cub, fără un termen pătrat în x1 (t):
tau_s(t) = k_g1*x1(t) + k_g3*x1(t)^3
unde k_g1 si k_g3 sunt doi parametri de rigiditate ai cutiei de viteze.
În alte tipuri de experimente de identificare discutate pe hârtie de Wernholt şi Gunnarsson, este posibil să se identifice momentul general de inerţie J = J_m + + J_g J_a. Cu aceasta, putem introduce un factor de scalare necunoscut a_m şi a_g, şi de a efectua următoarele reparametrizari
J_m = J*a_m
J_g = J*a_g
J_a = J*(1-a_m-a_g)
unde numai a_m si a_g trebuie sa fie estimate.
Cu toate ca acest lucru dă următoarea structură de stare, implicând 13 diferiţi parametri: Fv, Fc, FCS, alfa, beta, J, a_m, a_g, k_g1, k_g3, d_g, k_a şi d_a. (Prin definiţie am folosit, de asemenea, faptul că sech (x) = 1/cosh (x).)
tau_f(t) = Fv*x3(t) + (Fc+Fcs/cosh(alpha*x3(t)))*tanh(beta*x3(t))
tau_s(t) = k_g1*x1(t) + k_g3*x1(t)^3
d/dt x1(t) = x3(t) - x4(t)
d/dt x2(t) = x4(t) - x5(t)
d/dt x3(t) = 1/(J*a_m)*(-tau_s(t) - d_g*(x3(t)-x4(t)) - tau_f(t) + u(t))
d/dt x4(t) = 1/(J*a_g)*(tau_s(t) + d_g*(x3(t)-x4(t)) - k_a*x2(t) - d_a*(x4(t)-x5(t)))
d/dt x5(t) = 1/(J(1-a_m-a_g))*(k_a*x2(t) + d_a*(x4(t)-x5(t)))
y(t) = x3(t)
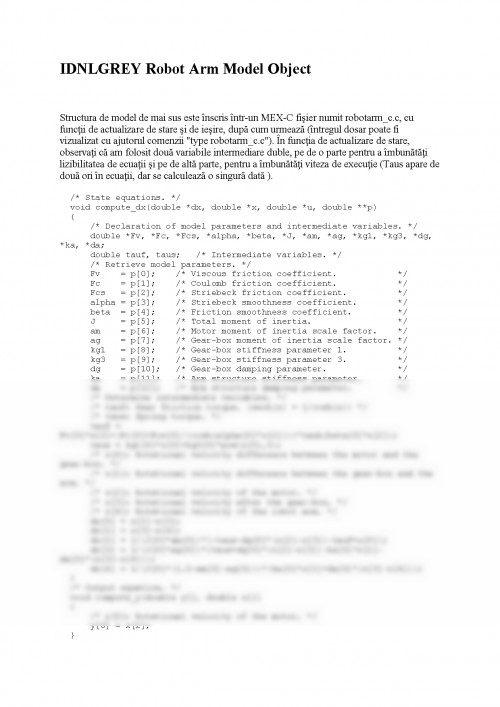
IDNLGREY Robot Arm Model Object
Structura de model de mai sus este înscris într-un MEX-C fişier numit robotarm_c.c, cu funcţii de actualizare de stare şi de ieşire, după cum urmează (întregul dosar poate fi vizualizat cu ajutorul comenzii "type robotarm_c.c"). În funcţia de actualizare de stare, observaţi că am folosit două variabile intermediare duble, pe de o parte pentru a îmbunătăţi lizibilitatea de ecuaţii şi pe de altă parte, pentru a îmbunătăţi viteza de execuţie (Taus apare de două ori în ecuaţii, dar se calculează o singură dată ).
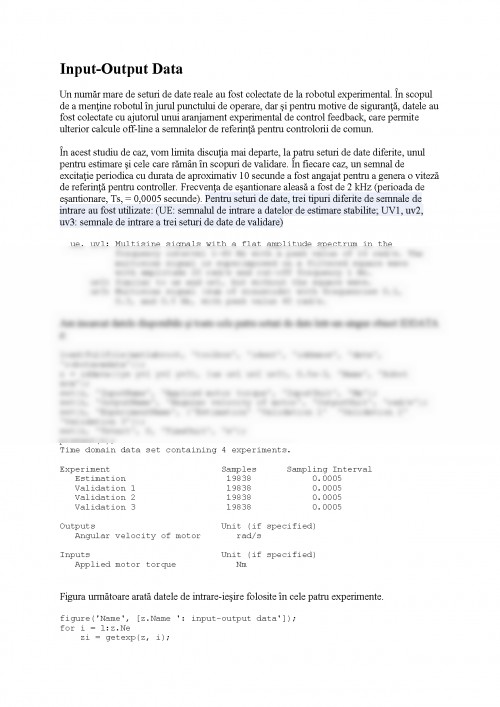
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.