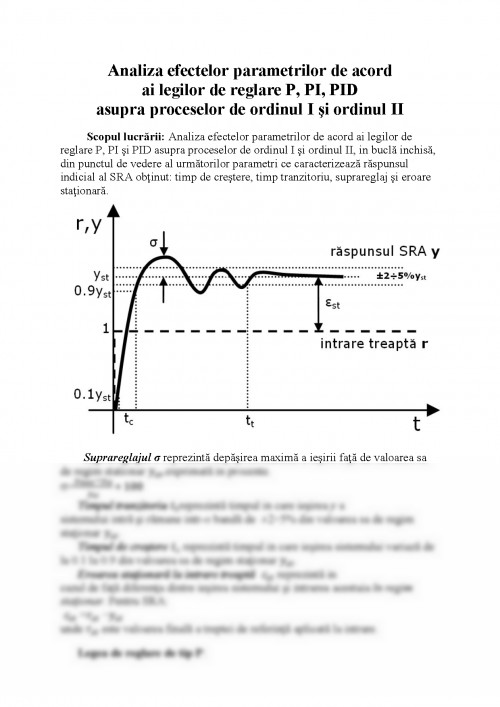
Analiza efectelor parametrilor de acord
ai legilor de reglare P, PI, PID
asupra proceselor de ordinul I şi ordinul II
Scopul lucrării: Analiza efectelor parametrilor de acord ai legilor de reglare P, PI şi PID asupra proceselor de ordinul I şi ordinul II, in buclă inchisă, din punctul de vedere al următorilor parametri ce caracterizează răspunsul indicial al SRA obţinut: timp de creştere, timp tranzitoriu, suprareglaj şi eroare staţionară.
Suprareglajul σ reprezintă depăşirea maximă a ieşirii faţă de valoarea sa de regim stationar y_st,exprimată in procente.
=(y_max-y_st)/y_st *100
Timpul tranzitoriu〖 t〗_treprezintă timpul in care ieşirea y a
sistemului intră şi rămane intr-o bandă de ±2÷5% din valoarea sa de regim
staţionar y_st.
Timpul de creştere t_c reprezintă timpul in care ieşirea sistemului variază de la 0.1 la 0.9 din valoarea sa de regim staţionar y_st.
Eroarea staţionară la intrare treaptă 〖〗_st reprezintă in
cazul de faţă diferenţa dintre ieşirea sistemului şi intrarea acestuia în regim
staţionar. Pentru SRA:
〖〗_st =r_st −y_st
unde r_st este valoarea finală a treptei de referinţă aplicată la intrare.
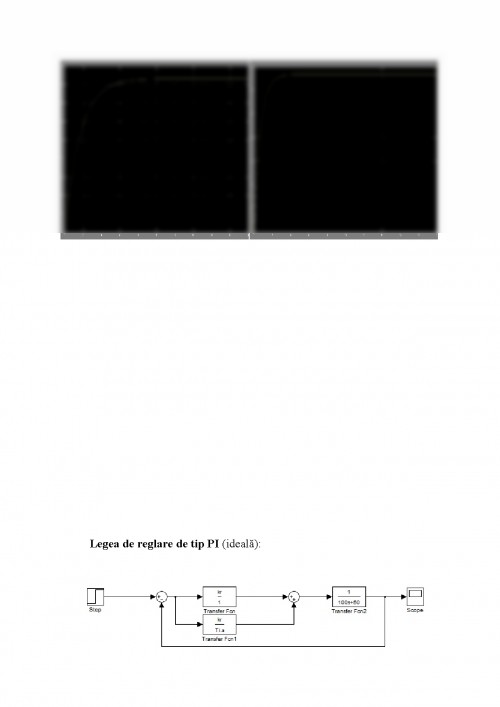
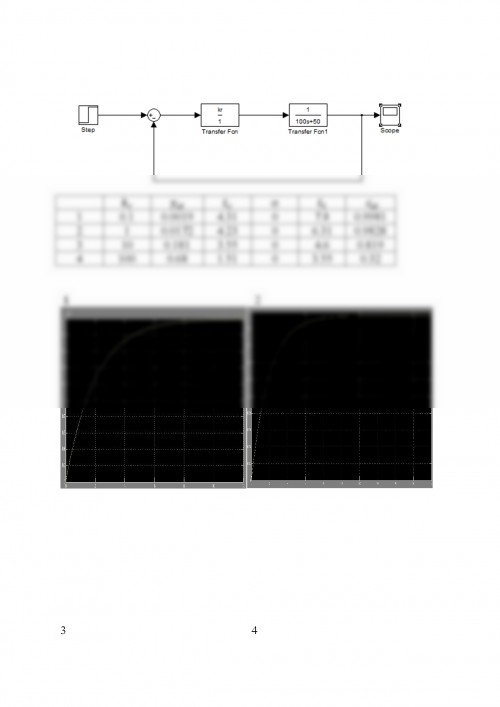
Legea de reglare de tip P:
III.Observaţii şi concluzii:
Pentru un regulator de tip P dacă variem Kr în sens crescător observăm ca timpul de creştere (Tc) scade, suprareglajul (Ϭ) rămâne constant la valoarea 0, timpul tranzitoriu (Tt) scade iar eroarea staţionară la intrarea treaptă (Зst) scade.
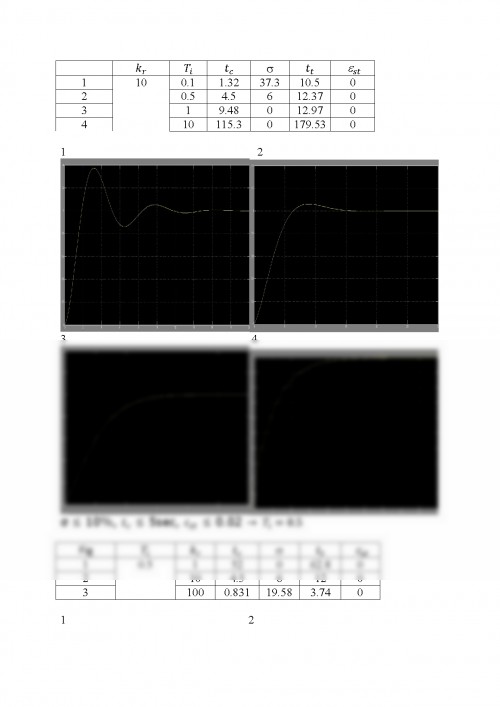
Pentru un regulator de tip PI daca variem Ti în sens crescător observăm ca timpul de creştere (Tc) creşte, suprareglajul (Ϭ) scade, timpul tranzitoriu (Tt) creşte iar eroarea staţionară la intrarea treaptă (Зst) rămâne constant la valoarea 0.
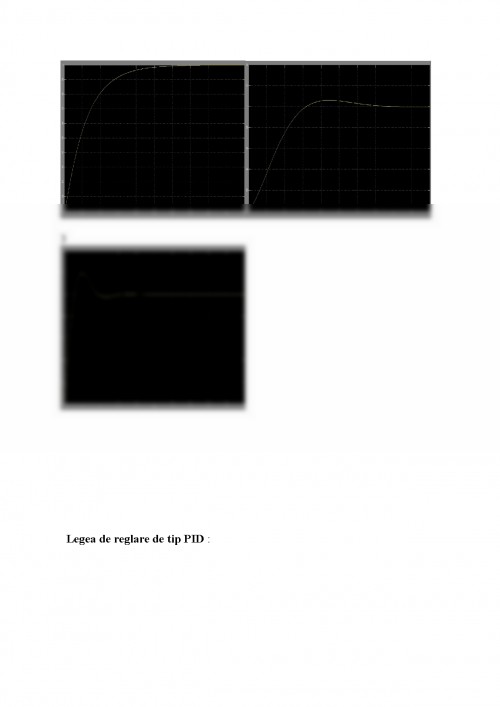
Pentru un regulator de tip PI daca variem Kr în sens crescător observăm ca timpul de creştere (Tc) scade, suprareglajul (Ϭ) creşte, timpul tranzitoriu (Tt) scade iar eroarea staţionară la intrarea treaptă (Зst) rămâne constant la valoarea 0.
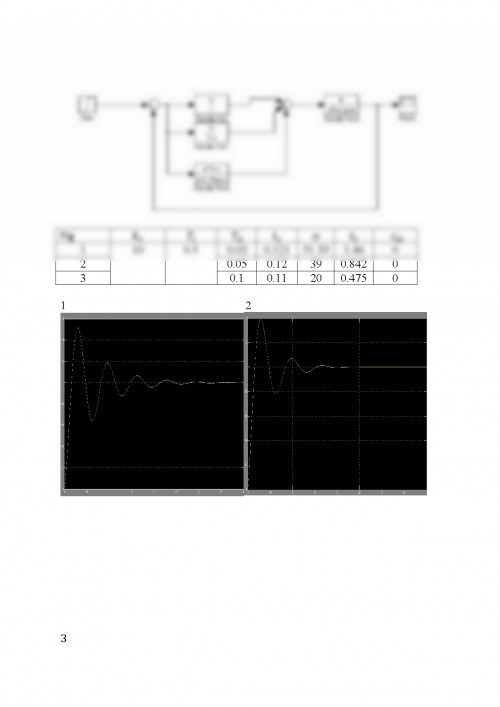
Pentru un regulator de tip PID daca variem Td în sens crescător observăm ca timpul de creştere (Tc) creşte, suprareglajul (Ϭ) scade, timpul tranzitoriu (Tt) scade iar eroarea staţionară la intrarea treaptă (Зst) rămâne constant la valoarea 0.
Universitatea Politehnica București
Facultatea de Inginerie Mecanică și Mecatronică
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.