

1.1. Roboti industriali in industrie
Automatizarea si robotizarea au devenit un factor decisiv de dezvoltare in industria fiecarei tari. Fara a mai socoti impactul avut asupra cresterii productivitatii muncii, ele imprima un puternic impuls imbunatatirii conditiilor de munca (in special celor monotone sau periculoase), intaririi controlului asupra sigurantei in functionare a instalatiilor industriale, contribuind la economisirea de energie si de materii prime, la optimizarea costurilor de infrastructura si a stocurilor, la realizarea unor operatii de productie complexe si, de asemenea, la cresterea calitatii produselor si serviciilor.
Principalele domenii de aplicare a robotilor industriali in industria automobilelor sunt:
- automatizarea unor operatii tehnologice realizate pe echipamente tehnologice universale si specializate;
- automatizarea asamblarii si demontarii unor sisteme;
- automatizarea depozitarii, sortarii si transferului pieselor;
- realizarea unor operatii specifice (sudura, vopsire, acoperiri cu materiale, debitare);
- automatizarea completa a productiei utilizandu-se calculatoarele de proces ce comanda linii de roboti si manipulatoare;
- incarcarea si descarcarea diferitelor masini ca: masini de formare prin injectie, prese, strunguri si masini de turnat.
Utilizarea robotilor in procesele de sudare reprezinta una din cele mai spectaculoase aplicatii ale robotilor in industria constructoare de automobile, permitand diversificarea gamei de produse prin cresterea flexibilitatii liniilor de fabricatie. Acesti roboti pot realiza suduri uniforme, de calitate, fiind eficienti atat in productia de serie mare, cat si in cea de serie mica si mijlocie.
Robotii industriali sunt utilizati si in sectoarele de prelucrari la cald. Acestia au fost introdusi in turnatorii pentru:
- descarcarea si incarcarea formelor de pe mijloacele de transport;
- scoaterea nisipului liber din forme; amplasarea filtrelor de turnare sau a suporturilor pentru miezuri;
- turnarea sub presiune sau turnarea in lingouri.
- Se tinde la o extindere a aplicarii robotilor in turnatorii, cum ar fi la taierea prin sudura, alimentarea cuptoarelor, slefuirea si sablarea pieselor turnate.
Robotii se folosesc, de asemenea, la depunerea straturilor de protectie galvanica si a straturilor de lac la vopsire. Aplicarea robotilor la aceste operatii a permis scoaterea operatorului din atmosfera daunatoare si marirea productivitatii muncii.
1.2. Caracteristici ale robotilor utilizati in industria automobilelor
Implementarea liniilor de fabricatie flexibile presupune realizarea unui studiu complex, realizat de catre echipe interdisciplinare. care includ specialisti din toate compartimentele unei intreprinderi. Acest studiu presupune parcurgerea unor etape obligatorii (identificarea si analiza problemei, stabilirea clara a obiectivelor studiului, evaluarea si analiza alternativelor, modelarea sistemului implementat, instalare si testare etc.). O etapa importanta o constituie alegerea robotilor care sa echipeze linia, astfel incat sa satisfaca cerintele impuse. Pentru aceasta trebuie cunoscute unele caracteristici ale robotilor: dimensiunile, valorile deplasarilor realizabile, precizia, repetabilitatea, numarul de grade de libertate, tipul de actionare, greutatea robotului, volumul spatiului de lucru, capacitatea sistemului de comanda si control, viteza, sarcina transportabila, conditiile de lucru etc.
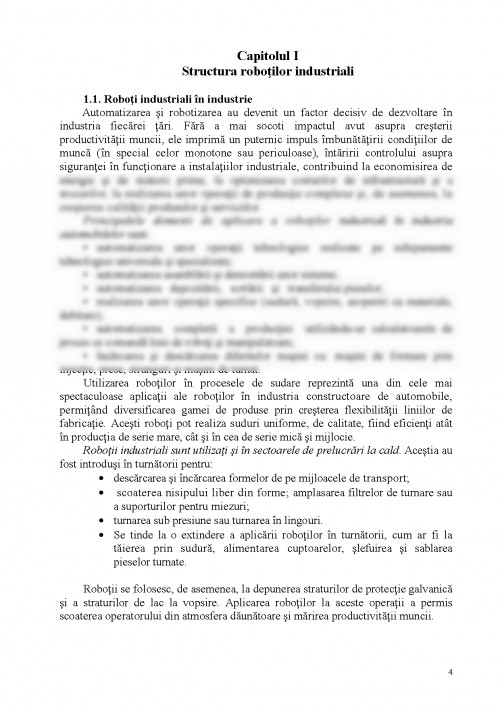
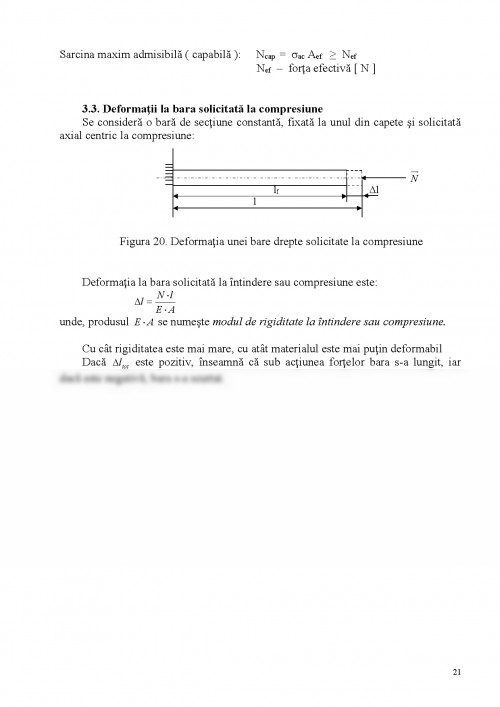
In figura 1 sunt prezentate schemele cinematice ale robotilor industriali utilizati in constructia de automobile evidentiindu-se posibilitatile de miscare si spatiul de lucru pentru fiecare tip.
Figura 1. Tipuri de roboti utilizati in industria automobilelor
Spre exemplu, tipul 1 (TTT), este utilizat in general pentru operatiuni desfasurate in spatii deschise, cum ar fi manipularea si aranjarea pieselor. In prezent, cel mai utilizat este tipul 5 (RRR). Spatiul de lucru depinde de lungimea elementelor robotului si poate fi extins, prin amplasarea robotului pe un suport mobil, care sa-1 deplaseze de exemplu de-a lungul unei linii.
Tendinta actuala este spre o dotare mai buna cu mijloace senzoriale ale robotilor, cat si utilizarea lor diversificata in sisteme flexibile robotizate. Scopul cercetarilor pe aceste sisteme flexibile este atingerea integrarii, folosind comenzi date de la calculatoare privind derularea intregului proces de productie, incepand de la proiectare si terminand cu montajul.
Utilizarea robotilor industriali este motivata de doua seturi de criterii:
- tehnico-economice si
- sociale.
Criteriile tehnico-economice urmaresc in special cresterea eficientei procesului de productie prin reducerea costurilor.
Criteriile sociale se refera la conditiile de munca, la caracterul si complexitatea muncii (gradul de periculozitate al locului de munca, solicitarea fizica si psihica, munca in medii nocive etc.). Analizand procesul de fabricatie a autovehiculelor militare se poate observa ca ambele seturi de criterii pot fi invocate pentru utilizarea robotilor industriali in acest proces.
Astfel, criteriile tehnico-economice impun realizarea unor celule flexibile de fabricatie pentru unele subansamble fabricate in serie medie sau mare (spre exemplu, fabricarea motoarelor, tinand cont de tendinta de realizare a unei familii de motoare, care sa echipeze majoritatea vehiculelor din dotarea unei armate).
Criteriile sociale impun automatizarea
[1]. Alexandru Chisiu s.a. Organe de masini, Editura Didactica si Pedagogica, Bucuresti, 1981
[2]. Ruxandra Noia si Liliana Tenescu, Organe de masini, Editura SIGMA, Bucuresti, 2002
[3]. Conf. Dr. Ing. Ion Gheorghe s.a. Utilajul si tehnologia meseriei - mecanic montator intretinere si reparatii in constructia de masini, Editura Didactica si Pedagogica, Bucuresti, 1995
[4]. Petre I. Miu, Introducere in mecatronica, Editura Didactica si Pedagogica, Bucuresti, 1999.
[5]. Vistrian Maties, s.a., Tehnologie si educatie mecatronica, Editura Economica, Bucuresti, 2002.
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.