Cap.1: Documentare despre Robotii Industriali
Roboti ABB:
ABB este un furnizor foarte important de roboți industriali, sisteme modulare de fabricație și de servicii. Aceste soluții ajută producătorii pentru îmbunătățirea productivității, a calității produselor și siguranța lucrătorilor. ABB a instalat mai mult de 200.000 de roboti la nivel mondial.
Cu mai mult de 35 de ani de experienta si mai mult de 200.000 de roboți instalati la nivel mondial, ABB Robotics este lider mondial în fabricarea, integrarea și punerea în aplicare a roboticii industriale și a sistemelor de automatizare de fabricație.
ABB Robotics oferă o gamă largă de dimensiuni și tipuri de roboți de sudură, manipulare materiale, asamblare industriala, vopsire, finisare si acoperire, îndepărtarea materialului, ambalare (cules, ambalare și paletizare) și aplicații pentru mașini care supravegheaza.
În 2011 ABB achiziționează într-o tranzacție Baldor Electric (SUA) pentru 4,2 miliarde $.
La data de 30 ianuarie 2012 ABB Group a achizitionat într-o tranzacție Thomas & Betts pentru suma de 3,9 miliarde $. La 15 iunie, 2012, ABB a finalizat achiziționarea tehnologiei comerciale și industrial wireless TROPOS.
În iulie 2013 ABB a achiziționat Power-One într-o tranzacție pentru suma de 1 miliard $, pentru a deveni cel mai mare producător mondial de invertoare solare.
Roboti KUKA:
KUKA este un producător german de roboți industriali și soluții pentru automatizări industriale. KUKA Robotics Corporation are 25 filiale la nivel mondial, cea mai mare parte de vânzări și sucursale fiind în Statele Unite ale Americii, Canada, Mexic, Brazilia, China, Japonia, Coreea, Taiwan, India, Rusia și majoritatea țărilor europene. Numele companiei, Kuka este un acronim pentru Keller und Knappich Augsburg.
Roboți industriali sunt utilizati într-o serie de domenii de aplicare, cum ar fi manipularea materialelor, încărcarea și descărcarea mașinilor, paletizare și depaletizare, sudare cu arc electric. Ei sunt utilizati într-un număr mare de companii, în principal în industria de automobile, dar și în alte industrii, cum ar fi industria aerospațială.
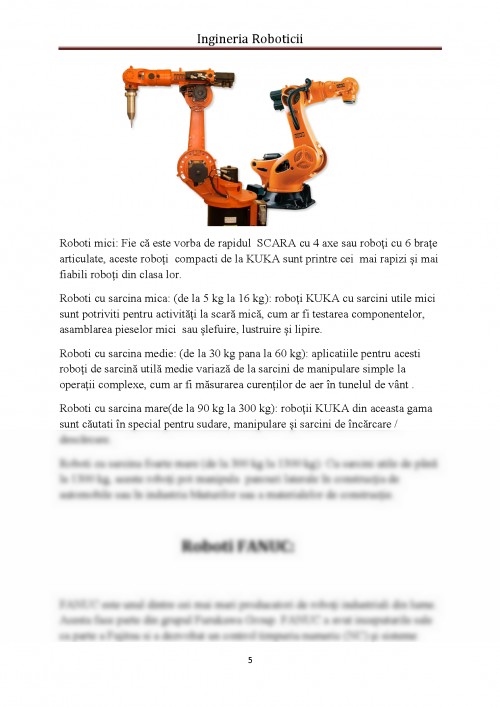
Roboti mici: Fie că este vorba de rapidul SCARA cu 4 axe sau roboți cu 6 brațe articulate, aceste roboți compacti de la KUKA sunt printre cei mai rapizi și mai fiabili roboți din clasa lor.
Roboti cu sarcina mica: (de la 5 kg la 16 kg): roboți KUKA cu sarcini utile mici sunt potriviti pentru activități la scară mică, cum ar fi testarea componentelor, asamblarea pieselor mici sau șlefuire, lustruire și lipire.
Roboti cu sarcina medie: (de la 30 kg pana la 60 kg): aplicatiile pentru acesti roboți de sarcină utilă medie variază de la sarcini de manipulare simple la operații complexe, cum ar fi măsurarea curenților de aer în tunelul de vânt .
Roboti cu sarcina mare(de la 90 kg la 300 kg): roboții KUKA din aceasta gama sunt căutati în special pentru sudare, manipulare și sarcini de încărcare / descărcare.
Roboti cu sarcina foarte mare (de la 300 kg la 1300 kg): Cu sarcini utile de până la 1300 kg, aceste roboți pot manipula panouri laterale în construcția de automobile sau în industria băuturilor sau a materialelor de construcție.
1.Blebea I, Ispas V, Proiectarea Robotilor Industriali
2. Blebea I, Ispas V, Calculul si constructia Robotilor Industriali
3. http://www.kuka-robotics.com/en/(traducere)
4. http://new.abb.com/products/robotics(traducere)
5. http://www.motoman.com/(traducere)
6. http://www.fanucamerica.com/(traducere)
7. http://www.directindustry.com/(traducere)
8. http://www.robotshop.com/en/motors-actuators.html
9. http://www.rasfoiesc.com/inginerie/tehnica-mecanica/Structura-generala-a-robotilor47.php
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.