Sistemul de actionare al unui robot cuprinde totalitatea surselor energetic ale robotului precum si elementele de control direct ale acestora. In acest sens, prin sistem de actionare se va intelege ansamblul motoarelor si convertoarelor prin care se obtine energia mecanica necesara deplasarii robotului precum si dispozitivele suplimentare ce controleaza acest transfer energetic.
Un astfel de sistem va cuprinde :
1) o sursa primara de energie ;
2) un sistem de conversie al energiei primare in energie mecanica ;
3) un sistem pentru transmisia energiei mecanice la articulatia
corespunzatoare ;
4) un control al parametrilor caracteristici ale acestor sisteme.
Structura generala a unui sistem de actionare este prezentata in figura 1.
Fig.1.Structura generala a unui sistem de actionare
Sistemele uzuale de actionare folosesc trei surse primare de energie :
-electrica
-pneumatica
-hidraulica.
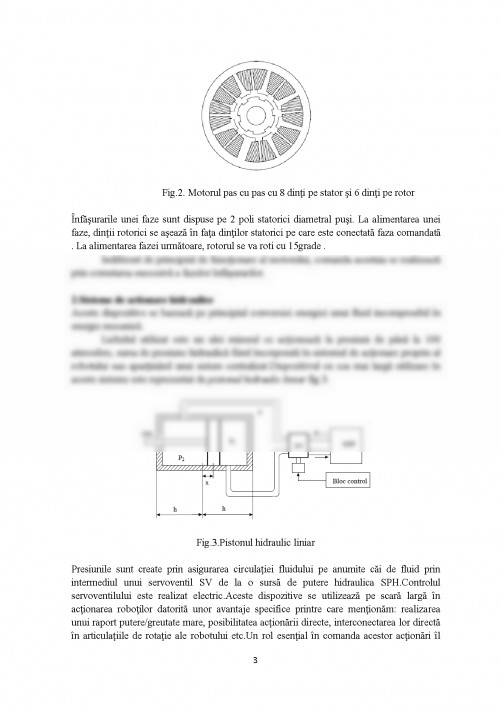
Procentual, cel mai mare numar de sisteme de roboti industriali moderni utilizeaza actionarea hidraulica datorita unor caracteristici deosebite pe care aceste echipamente le ofera in ceea ce priveste raportul dintre forta exercitata la dispozitivul motor si greutatea acestuia. O arie larga o au deasemenea actionarile electrice, utilizate indeosebi datorita facilitatilor de control pe care le pot asigura. Actionarea pneumatica ocupa o pondere redusa in aceasta directie , ea fiind de obicei utilizata in sistemele de comanda ale dispozitivelor auxililiare.
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.