In this essay I will try to equilibrate the inverted pendulum situated on a cart wich glides along a guidage. The cart is driven by a stepper motor. The goal of this essay is mentaining the inverted pendulum in a vertical position for over than 5 seconds. I will present a few considerations concerning the inverted pendulum and some keys in doing this.
Introduction
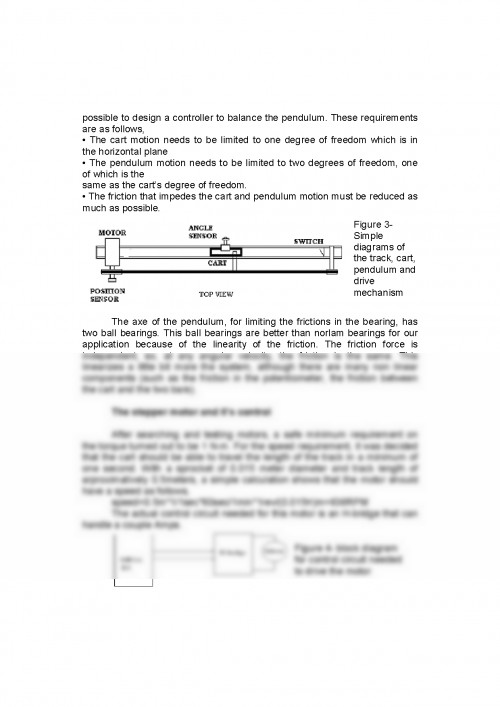
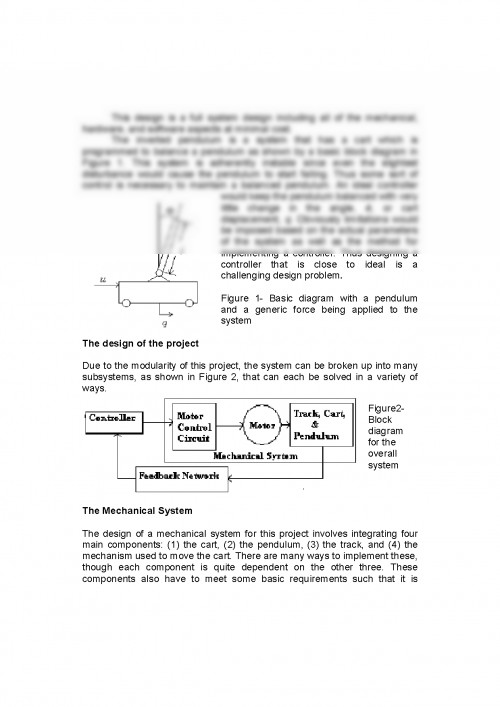
The inverted pendulum is a classical control problem, which involves developing a system to balance a pendulum. For visualization purposes, this is similar to trying to balance a broomstick on a finger. To study this problem, this project incorporated a full system design including all of the mechanical, hardware, and software design at minimal cost. There are threemain subsystems that compose this design: (1) the mechanical system, (2) the feedback network which includes sensors and a method to read them, and (3) a controller and its interface to the mechanical system. The mechanical design involved building a track, cart, pendulum, and drive mechanism.
Digilent Cerebot Board Reference Manual
http://www.digilentinc.com/Data/Products/CEREBOT/CEREBOT-rm.pdf
Designing the inverted pendule
http://www.livingcontrolsystems.com/demos/inverted_pendulum/inverted_pendulum.pdf
Potentiometers
http://en.wikipedia.org/wiki/Potentiometer
Stepper Motor
http://en.wikipedia.org/wiki/Stepper_motor
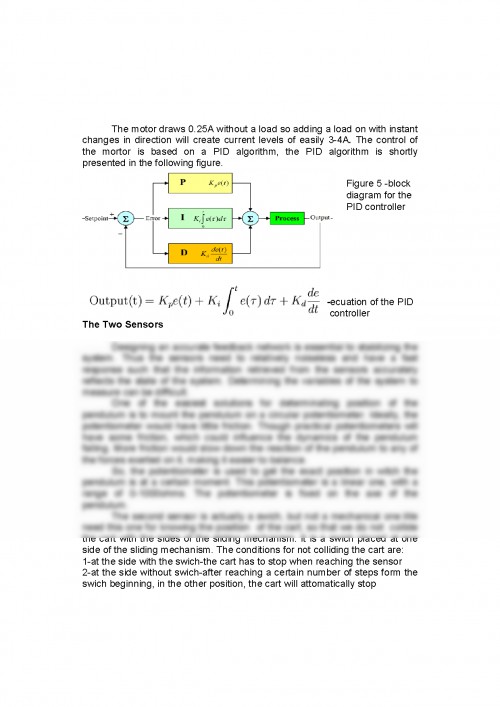
PID control
http://en.wikipedia.org/wiki/PID_control
www.google.com
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.