1. OPERATII CU VECTORI
1.1. Sumarea si multiplicarea vectorilor cu o marime scalara
Vectorii sunt entitati matematice, caracterizati de marime, directie,
sens si punct de aplicatie.
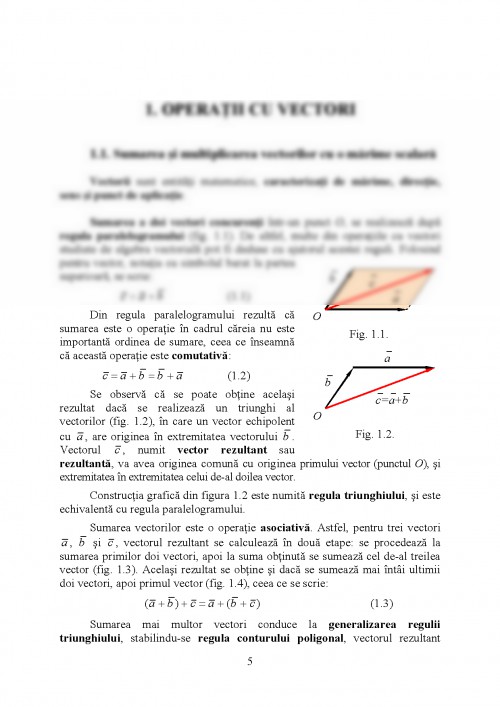
Sumarea a doi vectori concurenti intr-un punct O, se realizeaza dupa
regula paralelogramului (fig. 1.1). De altfel, multe din operatiile cu vectori
studiate de algebra vectoriala pot fi deduse cu ajutorul acestei reguli. Folosind
pentru vector, notatia cu simbolul barat la partea
superioara, se scrie: c
a
b
c = a + b (1.1)
Din regula paralelogramului rezulta ca
sumarea este o operatie in cadrul careia nu este
importanta ordinea de sumare, ceea ce inseamna
ca aceasta operatie este comutativa:
O
Fig. 1.1.
c = a + b = b + a (1.2)
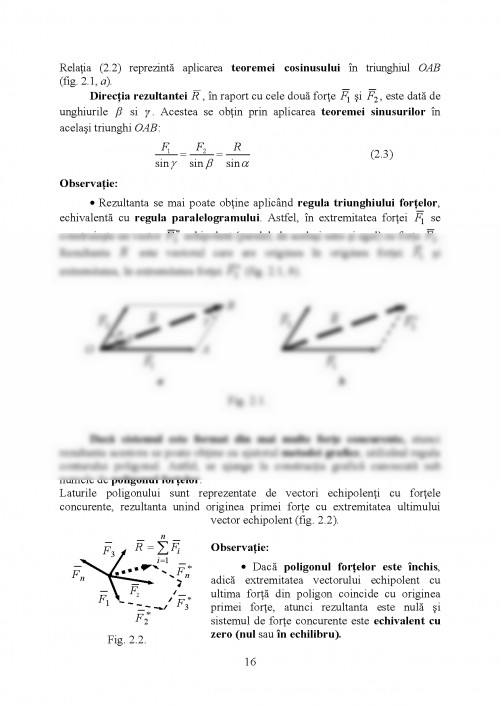
Se observa ca se poate obtine acelasi
rezultat daca se realizeaza un triunghi al
vectorilor (fig. 1.2), in care un vector echipolent
cu a , are originea in extremitatea vectorului b .
Vectorul c , numit vector rezultant sau
rezultanta, va avea originea comuna cu originea primului vector (punctul O), si
extremitatea in extremitatea celui de-al doilea vector.
b
c=a+b
a
O
Fig. 1.2.
Constructia grafica din figura 1.2 este numita regula triunghiului, si este
echivalenta cu regula paralelogramului.
Sumarea vectorilor este o operatie asociativa. Astfel, pentru trei vectori
a , b si c , vectorul rezultant se calculeaza in doua etape: se procedeaza la
sumarea primilor doi vectori, apoi la suma obtinuta se sumeaza cel de-al treilea
vector (fig. 1.3). Acelasi rezultat se obtine si daca se sumeaza mai intai ultimii
doi vectori, apoi primul vector (fig. 1.4), ceea ce se scrie:
(a + b ) + c = a + (b + c) (1.3)
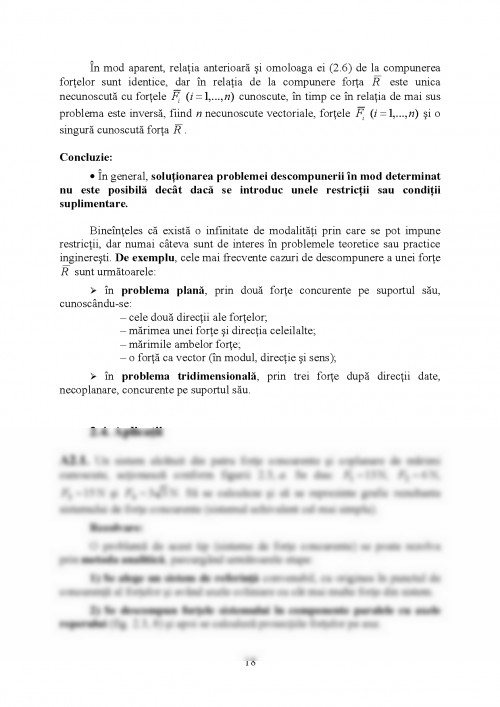
Sumarea mai multor vectori conduce la generalizarea regulii
triunghiului, stabilindu-se regula conturului poligonal, vectorul rezultant
avand originea comuna cu primul vector, iar extremitatea in extremitatea
ultimului vector.
(a+b)+c
a+b
b
c
a
b+c
b c
a
a+(b+c)
Fig. 1.3. Fig. 1.4.
Cea mai simpla operatie de multiplicare a vectorilor este multiplicarea
cu un scalar (sau cu o marime scalara).
Marimea scalara este o entitate caracterizata printr-un numar.
Daca ? este un scalar, atunci prin multiplicarea vectorului a cu scalarul ?
intelegem un vector ? a care are urmatoarele caracteristici:
- marimea este egala cu produsul dintre ? si modulul vectorului a ;
- directia aceeasi cu cea a vectorului a ;
- sensul este acelasi cu sensul vectorului a daca ? este pozitiv, sau de
sens opus daca ? este negativ;
- punctul de aplicatie coincide cu al vectorului a .
1.2. Versorii si componentele ortogonale ale unui vector
Daca vectorul
a
u = a , unde a este marimea vectorului a , este
adimensional, are marimea egala cu unitatea si are aceeasi directie cu vectorul
a , atunci u se numeste versorul directiei vectorului a .
Versorii directiilor predefinite furnizeaza mecanismul obisnuit de
exprimare a vectorilor. Astfel, orice vector se poate exprima in functie de
versorul directiei sale:
a = a u (1.4)
Fie un sistem de axe triortogonal cartezian drept Oxyz, pentru care
versorii acestor axe sunt i , j si k .
Regula paralelogramului ne permite sa descompunem un vector a in trei
componente reciproc ortogonale scrise axi , ay j si azk (fig. 1.5), astfel incat:
a = axi + ay j + azk (1.5)
Relatia (1.5) reprezinta expresia analitica a vectorului a in raport cu
sistemul de axe Oxyz.
Numim proiectiile vectorului a pe cele trei axe, marimile scalare ax, ay,
si az (fig. 1.6), care se scriu in functie de unghiurile ?, ? si ? pe care le face
vectorul a cu cele trei axe Ox, Oy si respectiv Oz:
ax = a cos? , ay = a cos? si az = a cos? (1.6)
Aceste cosinusuri sunt numite cosinusurile directoare ale vectorului a .
Intre ele exista relatia:
[1] Alexandrescu M. - Mecanica teoretica (fundamentele mecanicii si statica), vol. I, Ed. Leda, Constanta, 1996.
[2] Alexandrescu M., Szolga V. - Mecanica, probleme de statica, ICB, 1982.
[3] Balan St. - Culegere de probleme de mecanica, Ed. didactica si pedagogica, Bucuresti, 1972.
[4] Gheorghiu Gh., Th. - Algebra liniara, geometrie analitica si diferentiala si programare, Ed. didactica si pedagogica, Bucuresti, 1977.
[5] Hangan S., Slatineanu I. - Mecanica, Ed. didactica si pedagogica, Bucuresti, 1983.
[6] Iliescu V., Dragomirescu Cr. - Statica, Ed. didactica si pedagogica, Bucuresti, 2003.
[7] Mechtcherski I., Recueil de problemes de mecanique rationnelle, Ed. Mir, Moscova, 1975.
[8] Szolga V., Szolga A.-M. - Mecanica teoretica: note de curs si indrumator de seminar, partea I, Ed Conspress, Bucuresti, 2003.
[9] Vasilescu A. - Complemente de mecanica. Curs si aplicatii pentru ingineri, Ed. Conspress, Bucuresti, 2000.
[10] Vasilescu A. - Mecanica - curs pentru colegiu universitar, Ed. Conspress, Bucuresti, 1998.
[11] Vilcovici,V., Balan St.,Voinea R. - Mecanica teoretica, Ed. tehnica, Bucuresti, 1968.
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.