
Robotii sunt masini electromecanice automate. Unii dintre roboti nu sunt complet automati dar sunt controlati de oameni prin telecomanda, utilizand camere video sau alte sisteme de control. Majoritatea robotilor sunt utilizati in procesele de fabricatie. Altii pot fi utilizati ca manipulatoare pe adancul marii, telecomandate. O alta categorie de roboti pot fi utilizati in diverse laboratoare unde se lucreaza cu substante radioactive sau exista temperaturi ridicate sau alte locuri periculoase. Unii roboti sunt mobili, avand sistem de locomotie incorporat, putandu-se deplasa pe uscat, pe apa, in aer. Modalitatile de propulsare sunt dintre cele mai diverse, cum ar fi: Controlul automat variaza, din punct de vedere al complexitatii, de la simple relee pana la metode computerizate foarte sofisticate. Robotii mobili, in majoritatea situatiilor, sunt dotati cu camere video sau alti senzori de percepere a mediului in care activeaza. Controlul uman se realizeaza prin folosirea unor simple butoane pana la joisticuri complicate cu putere de raspuns.
Sistemele de comanda includ module de comunicare bazate pe unde radio, sonare (acustice), echolocalizare (ghidare prin ecran), fibre optice sau cabluri. Multi roboti sunt construiti prin inlantuirea unor componente care imita segmentele bratului uman. Toate metodele sunt limitate de imposibilitatea de potrivire perfecta cu capacitatea de manevrabilitate a mainii umane sub controlul ochiului si creierului uman. Ingineria robotilor a fost foarte mult influentata de fictiune, in sensul ca are doza ei de utopie. Totusi, foarte multi bani sunt in continuare cheltuiti pentru cercetarea in domeniul obtinerii de fiinte artificiale prin duplicarea mainilor si propulsiei prin mers pasitor biped. Robotii mobili Universul in care isi desfasura activitatea robotul fixat la sol, poate fi extins prin crearea capacitatii de mobilitate a bazei robotului, functie de reperul fix la sol.
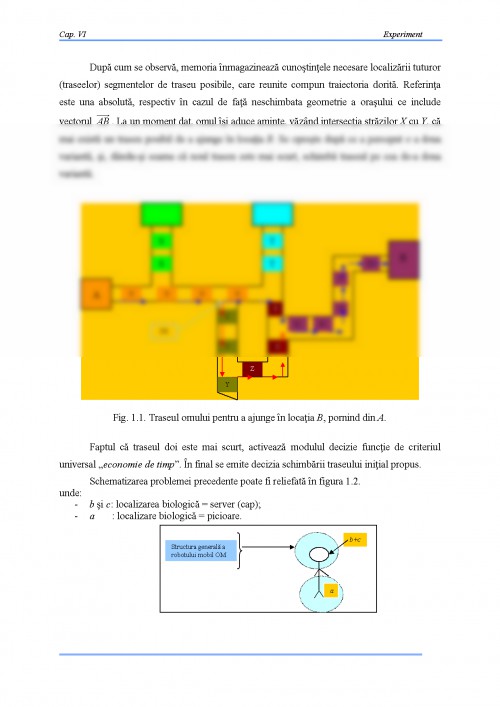
De altfel, se stie ca executarea unei lucrari atrage dupa sine necesitatea de a cunoaste pozitia robotului fata de elementele fizice manipulate implicate in aceasta lucrare. De asemenea, unul din punctele fundamentale ale robotului pe vehicul consta in a cunoaste unde se afla el in mijlocul universului pe care il poate parcurge. Solutia acestei probleme nu a fost imediata, cercetatorii focalizandu-si atentia asupra vehiculului astfel incat se intelege adesea prin robot mobil o platforma care se doreste a fi in totalitate automata (capabila prin ea insasi de a se deplasa, de a se plasa si de a sti ce drum trebuie sa urmeze in functie de ce obiectiv i s-a indicat) uitand momentan unealta de lucru a fi montata pe platforma, adica robotul fixat.
Termenii sinonimi robotului mobil sunt: robot mobil autonom; robot automotor.
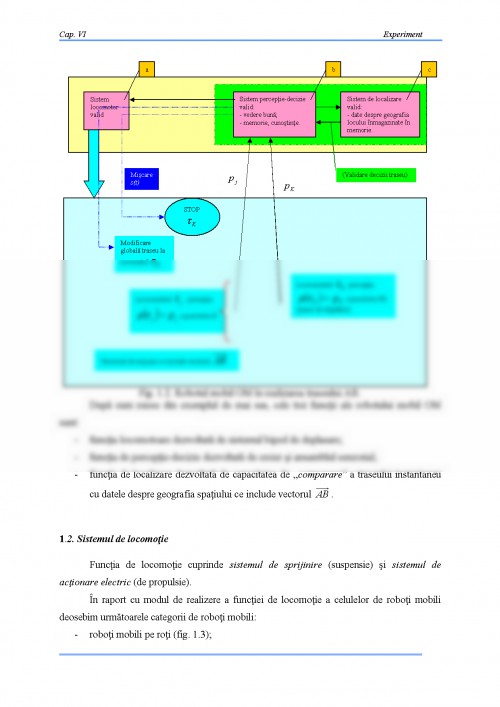
Structura unui robot mobil Singurele lucruri vizate au fost cercetarea si executarea de traiectorii pentru vehicul, avand obiceiul de a caracteriza robotul mobil prin trei functii care sunt: functia de locomotie; functia de ...
LUCIAN CIOBANU - "ELEMENTE DE PROIECTARE A SISTEMELOR FLEXIBILE DE FABRICATIE SI A ROBOTILOR INDUSTRIALI" - EDITURA BIT, IASI, 1997
LUCIAN CIOBANU - "ROBOT MOBIL GHIDAT PRIN FIR CONDUCTOR" - LUCRARILE "ELECTROTEHNICA 80", IASI, 1992
MIRCEA MIHAIL POPOVICI - "MECANICA TEHNICA PENTRU MUNCITORI" - EDITURA TEHNICA, BUCURESTI, 1973
VIRGIL OLARIU, PETRE SIMA, VALERIU ACHIRILOAIE - "MECANICA TEHNICA" - EDITURA TEHNICA, BUCURESTI, 1982
V. VALCOVICI, ST. BALAN, R. VOINEA - "MECANICA TEORETICA" - EDITURA TEHNICA, BUCURESTI, 1986
NICOLAE GALAN, CONSTANTIN GHITA, MIHAI CRISTELECAN - "MASINI ELECTRICE" - EDITURA DIDACTICA SI PEDAGOGICA, BUCURESTI, 1981
LUCIAN CIOBANU - "SISTEME DE ROBOTI CELULARI" - EDITURA TEHNICA, BUCURESTI, 2002
PHILIPPE COIFFET - "LA ROBOTIQUE, PRINCIPES ET APPLICATIONS" - EDITIONS HERMES, PARIS, 1986
VASILE M. CATUNEANU - "TEHNOLOGIE ELECTRONICA" - EDITURA DIDACTICA SI PEDAGOGICA, BUCURESTI, 1981
GH. RADULESCU, GH. MILOIU, N. GHEORGHIU, C. MUNTEANU, FL. VISA, N. IONESCU, VL. POPOVICI, G. DOBRE, M. RASEEV - "INDRUMAR DE PROIECTARE IN CONSTRUCTIA DE MASINI" - EDITURA TEHNICA, BUCURESTI, 1986, VOL. III
IOAN DAN FILIPOIU SI ANDREI TUDOR - "PROIECTAREA TRANSMISIILOR MECANICE" - EDITURA BREN, BUCURESTI, 2001
CATALOG PENTRU COMPONENTE OPTOELECTRONICE (LED SI FOTODIODA), BANEASA S. A. , BUCURESTI, 2000
VIVIANA FILIP - "PROIECTAREA MODELAREA SI SIMULAREA SISTEMELOR MECATRONICE" - CURS, 2003
MIHAITA ARDELEANU - "ROBOTI INDUSTRIALI MOBILI" - CURS, 2003
VALERICA CIMPOCA - "APARATURA OPTOELECTRONICA" - CURS, 2003
GHE. HUSEIN, M. TUDOSE - "DESEN TEHNIC" - EDITURA DIDACTICA SI PEDAGOGICA, BUCURESTI, 1973
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.