Una dintre solicitarile majore in control a fost analizarea si proiectarea sistemelor de control multivariabile (MIMO). Aceasta este o problema dificila pentru ca functia de transfer a sistemelor MIMO este o matrice. Reglarea conceptelor foarte fundamentale ca: ordinul sistemului, polii si zerourile, creaza dificultati in acest caz. Controlul clasic al locului radacinilor, diagrama Bode, Criteriul de stabilitate Nyquist, si castigul si marginile de faza initial conduc spre dificultate cand sunt aplicate la sisteme multivariabile. Tehnicile sistemelor stationare au la baza domeniul de timp, scapand de complexitatea matricelor functiei de transfer si au furnizat metode noi pentru analiza si proiectarea sistemelor MIMO.
In cadrul spatiului starilor, singura diferenta intre sistemele SISO si MIMO este numarul de coloane a matricei B (numarul de intrari in sistem) si numarul de linii in matricea C (numarul de iesiri din sistem). LQR si LQG sunt metodele de proiectare a sistemelor MIMO.
Aproape in acelasi timp in care majoritatea cercetatorilor dezvoltau, raspandeau si rafinau metodele optime de control a domeniului timpului, alti cercetatori (majoritatea britanici: A. G. J. MACFARLANE si H.
H. ROSENBROCK) au fost preocupati de dezvoltarea sistemelor de control clasice in cazul sistemelor multivariabile. Instrumentele clasice ca: locul radacinilor (renumit locul caracteristic), tehnica Nyquist (redenumita ordinea Nyquist) si planurile Bode (redenumite planurile valorilor singulare) au fost extinse la cazurile multivariabile; asa cum rapida aparitie a metodelor LQG au devenit mai aparente in anii 70 si a fost acordata mai multa atentie conceptelor de control clasic.
Stiind ca problema stabilizarii robuste poate fi formulata ca o problema de optimizare H (si ca o serie de performante impuse sistemului nominal pot fi reformulate ca problema de optimizare H (, putem prezenta atat obiectivele de stabilitate robusta cat si cele de performanta intr-un cadru standard, sub forma unei probleme de optimizare H (. Specificatia unei probleme H (va combina nu numar de functii de transfer in circuit inchis ponderate dupa frecventa si va minimiza norma H (a matricei de transfer compuse. Selectarea corespunzatore a ponderilor dupa frecventa si intre obiective nu este directa si tinde sa fie dezvoltata pentru fiecare exemplu specific.
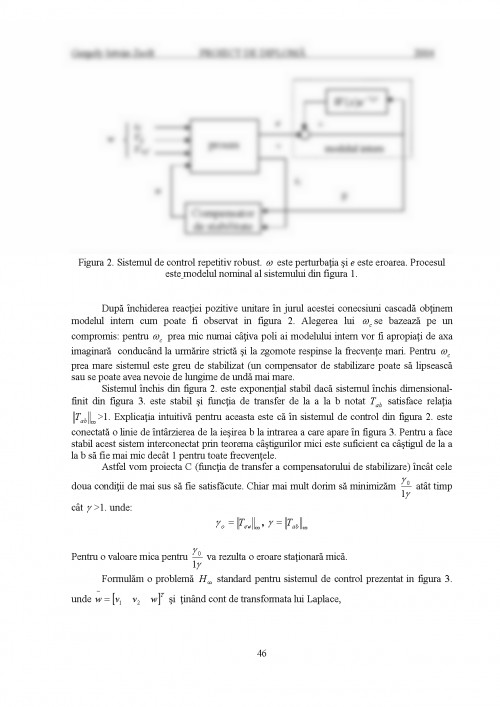
Este posibil sa se compuna mai multe asemene obiective sub forma unei singure transformari liniar-functionare (I (P, K), care trebuie sa fie minimizata prin alegerea lui K.
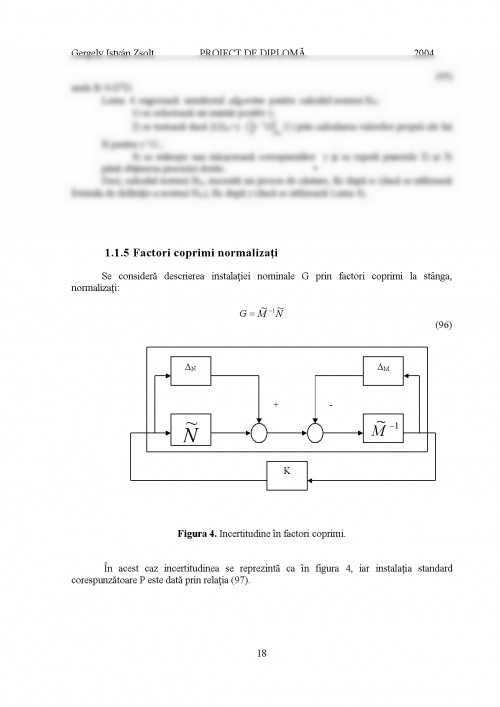
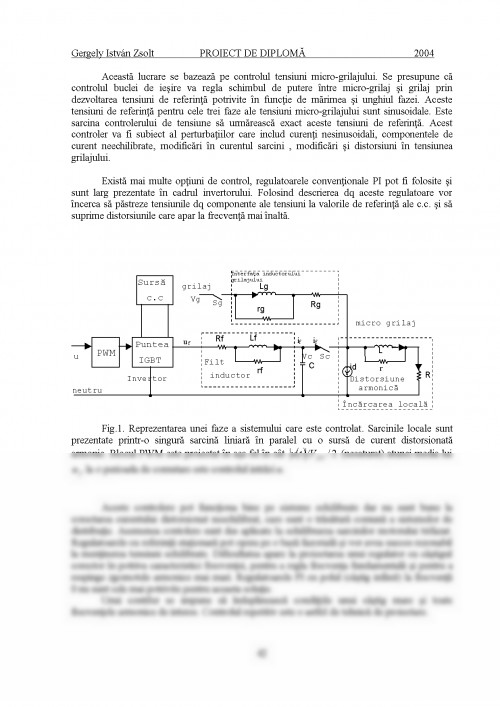
w (Rm1, este vectorul marimilor exogene, constand din semnalele de referinta, perturbatii si zgomote senzoriale (de masura); Figura 1. Schema bloc standard.
u (Rm2, este vectorul marimilor de comanda; z (Rp1, reprezinta vectorul marimilor reglate (marimilor de calitate), componentele acestuia fiind erorii de urmarire, semnale de comanda filtrate etc; y (Rp2, este vectorul marimilor masurate.
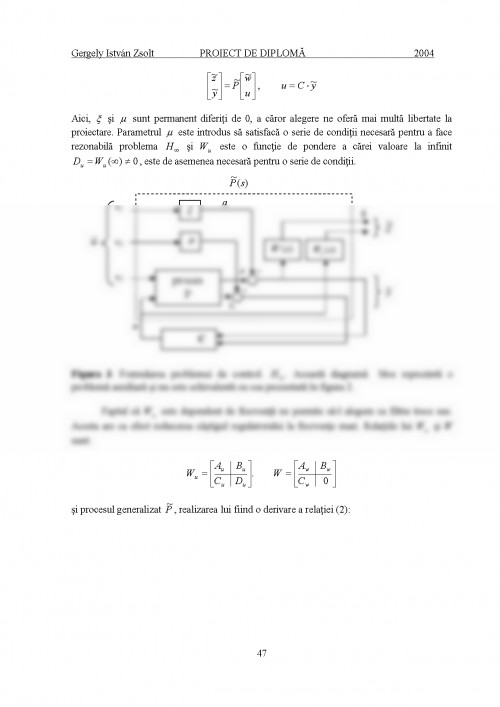
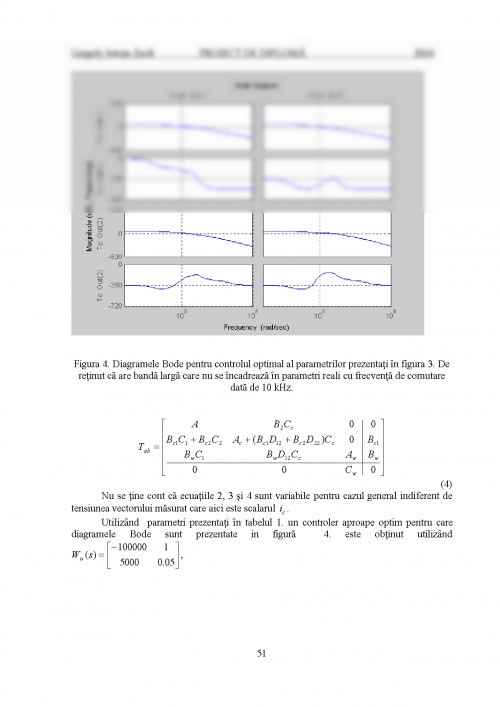
Matricele de transfer P (instalatia generalizata) si K (compensatorul) sunt, prin ...
CLEMENT FESTILA, MIHAIL ABRUDEAN, EVA DULF - "ELECTRONICA DE PUTERE IN AUTOMATICA" - EDITURA MEDIAMIRA, CLUJ-NAPOCA, 2004
DAN POPESCU - "SISTEME ROBUSTE" - REPROGRAFIA UNIVERSITATI DIN CRAIOVA , 1997
ARPAD KELEMEN, M. IMECS - "SISTEME DE REGLARE CU ORIENTARE DUPA CAMP ALE MASINILOR DE CURENT ALTERNATIV" - EDITURA ACADEMIEI, BUCURESTI, 1989
N. JENKINS, R. ALLAN, P. CROSSLEY, D. KIRSCHEN, AND G. STRBAC - "EMBEDDED GENERATION IEE POWER AND ENERGY SERIES" - IEE BOOKS, 2000
Z. CHEN, E. SPOONER - "GRID POWER QUALITY WITH VARIABLE SPEED WIND TURBINES" - IEEE TRANS. ON ENERGY CONVERSION, VOL. 16, NO. 2, 2001
M. ETEZADI-AMOLI, K. CHOMA - "ELECTRICAL PERFORMANCE CHARACTERISTICS OF A NEW MICRO-TURBINE GENERATOR" - IN IEEE POWER ENGINEERING SOCIETYWINTER MEETING, 2001
J.H.R. ENSLIN, M.S. WOLF, D.B. SNYMAN, W. SWIEGERS - "INTEGRATED PHOTOVOLTAIC MAXIMUM POWER POINT TRACKING CONVERTER" - IEEE TRANS. INDUSTRIAL ELECTRONICS, VOL 44, NO. 6, 1997
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.