Tema : Echilibru rotorului cu pozitie cunoscuta a maselor dezechilibrate
Scopul lucrarii: A lua cunostinta de metodele echilibrarii statice si dinamice a maselor rotative.
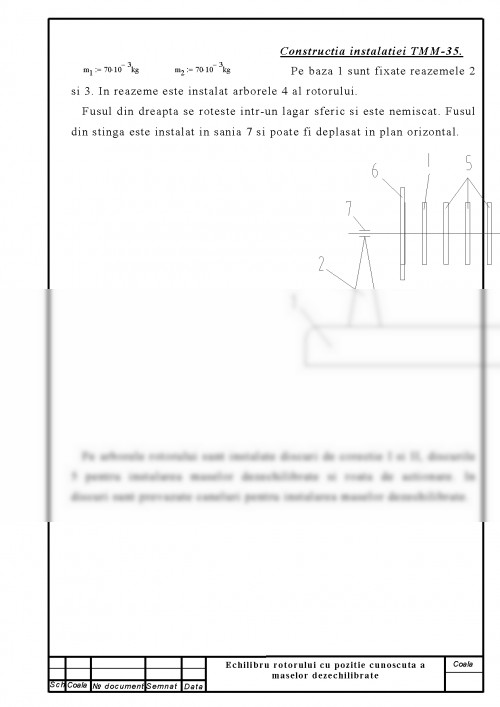
Utilaje şi accesorii: instalatia TMM-35, calculator electronic, hirtie milimetrica, trusa de desen.
BAZELE TEORETICE
Echilibrarea mecanismelor si masinilor are ca scop anularea sau micsorarea actiunii daunatoare a fortelor de inertie. Fortele de inertie au marimi si directii variabile.
In teoria echilibrarii orice element ce se roteste este numit rotor.
Daca la turatia rotorului apar solicitari dinamice in reazime ce se manifesta prin vibratia suportului, atunci asa rotor este numit dezechilibrat. Sursa a acestor solicitari dinamice in cel mai des caz este distributia asimetrica a masei rotorului dupa volum. Pentru inlaturarea completa a acestor solicitari este necesar ca vectorul principal Pi si momentul principal al fortelor de inertie Mi sa fie egale cu zero in orice moment al miscarii:
Pi=0 Mi=0
Conditia Pi=0 este realizata, daca centrul maselor este situat pe axa de rotatie a rotorului. Distribuirea masei corpului ce se roteste in asa fel, ca centrul maselor sa fie transferat pe axa de rotatie, se numeste echilibrarea statica a rotorului.
Daca conditia nu se realizeaza, rotorul se numeste static dezechilibrat. Drept masura a dezechilibrului static este acceptata valoarea momentului static a rotorului fata de axa de rotatie.
Asa dezechilibru se numeste static, fiindca el poate fi determinat prin incercari statice.
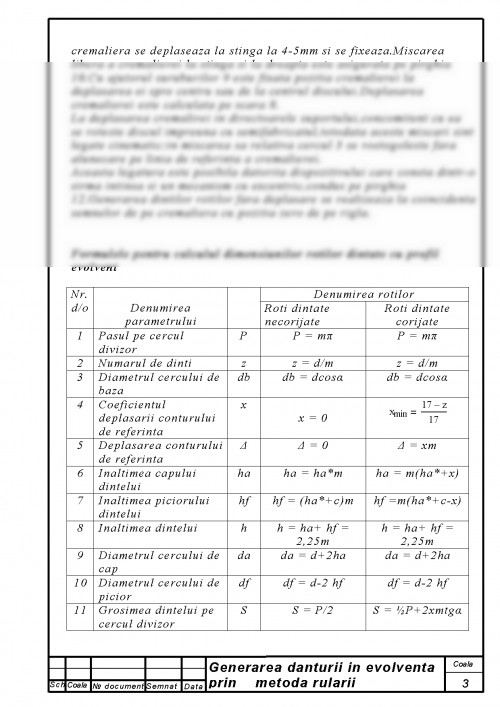
Echilibrarea statica poate fi executata prin instalarea unei mase suplimentare mn la distanta ra de la axa de rotatie, ca sa fie realizata conditia mn*rn=mr=∆.
Deseori contra greutatea este inlocuita prin eliminarea masei mn. In acest caz centrele maselor contragreutatilor si ale elementului trebuie sa se gaseasca de aceeasi parte a axei de rotatie. Echilibrarea statica este aplicata numai la roti cu lungime mica. Pentru roti, lungimea carora depaseste cu mult diametrul, este necesara indeplinirea ambelor conditii de echilibrare:
Pi=0 Mi=0
Distribuirea masei rotorului ce se roteste in asa fel, ca sa fie inlaturata actiunea fortelor de inertie asupra suportului, se numeste echibrare dinamica.
Echilibrarea dinamica este realizata prin instalarea contragreutatilor in doua plane arbitrare, numite plane de corectie.
Mrimea si pozitia acestor contragreutati trebuie alese asa, ca fortele lor de inertie sa echilibreze fortele de inertie a dezechilibrului elementului. Aceasta problema poate fi rezolvata prin metoda analitica sau grafica.
Rotorul proectat corect din punct de vedere al echilibrarii complete totusi poate avea un oarecare dezechilibru din cauza neomogenitatii materialului, din care el este executat, greselelor prelucrarii si asamblarii. Toate elementele care se rotesc cu viteza mare sunt controlate experimental cu ajutorul unor dispozitive speciale, care se numesc masini de asamblare.
Lucrari de laborator pentru anul 2 universitar la mecanica, lab 2 si 3
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.