
1. Servomotorul standard are un mecanism de feedback conectat la elice. Dupa ce este citita pulsatia, pozitia actuala este comparata cu cea initiala, iar elicea se va roti pana cand cele doua valori coincid. Servomotorul are un cuplu mare cand este pozitionat.
Servomotorul cu rotatie continua are un mecanism de feedback care este ajustat la un puls de centru (750 or 1.5mS) pentru a opri servomotorul. Pulsuri cu valori mai mari sau mai mici ii permit sa se roteasca liber cu viteze diferite in ambele directii.
2. Deoarece serovmotoarele nu sunt pre-ajustate din fabrica, acestea se ajusteaza cu ajutorul unei surubelnite pentru a sta nemiscate. Acest lucru se numete centrarea servo. Dupa ajustare se va testa servomotorul pt a ne asigura ca ele functioneaza intr-un mod corespunzator.
3. Variabilele sunt folosite pt a stoca valori. Inainte de a putea utilize o variabila in PBASIC trebe sa ii dam un nume sis a specificam dimensiunea sa. Acest lucru se num declararea unei variabile. Tipuri de variabile: Bit(0-1), Nib(0-15), Byte(0-255), Word(0-65535 sau -32768 la +32767)
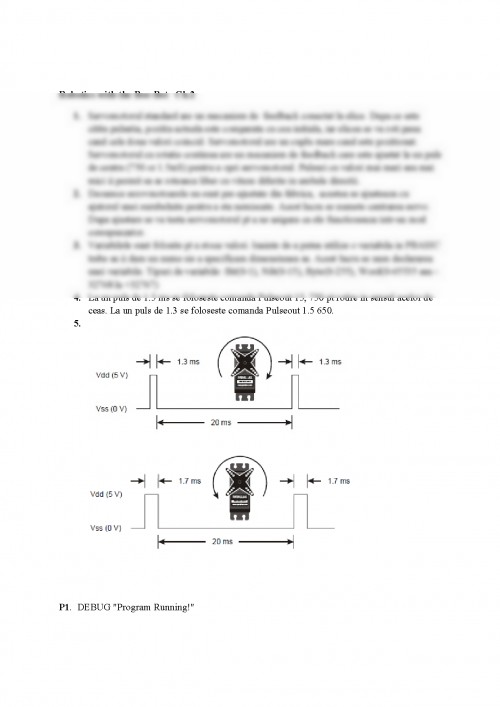
4. La un puls de 1.5 ms se foloseste comanda Pulseout 15, 750 pt rotire in sensul acelor de ceas. La un puls de 1.3 se foloseste comanda Pulseout 1.5 650.
5.
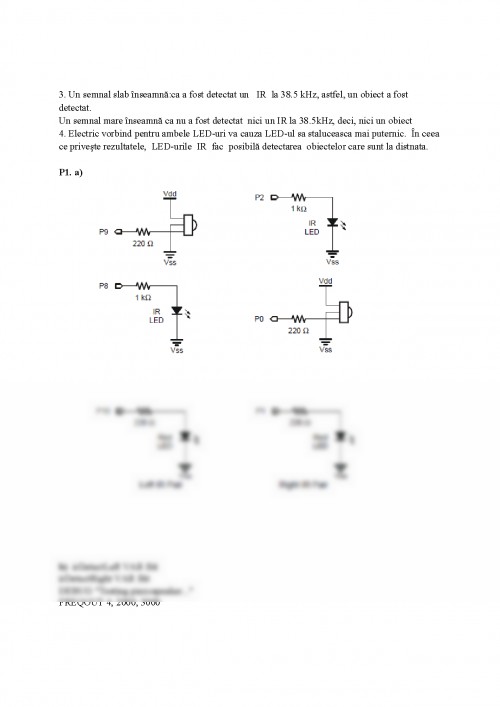
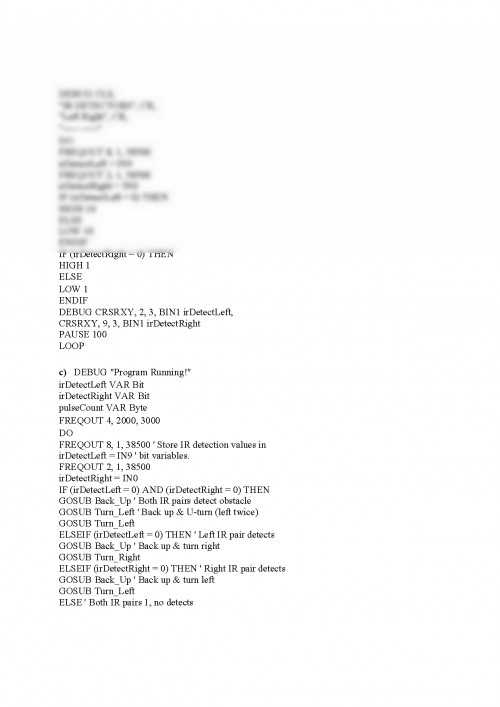
P1. DEBUG "Program Running!"
counter VAR Word
FOR counter = 1 TO 120 ' Loop for three seconds
PULSOUT 13, 850 ' P13 servo counterclockwise
PULSOUT 12, 850 ' P12 servo counterclockwise
PAUSE 20
NEXT
FOR counter = 1 TO 124 ' Loop for three seconds
PULSOUT 13, 650 ' P13 servo clockwise
PULSOUT 12, 650 ' P12 servo clockwise
PAUSE 20
NEXT
FOR counter = 1 TO 122 ' Loop for three seconds
PULSOUT 13, 650 ' P13 servo clockwise
PULSOUT 12, 850 ' P12 servo counterclockwise
PAUSE 20
NEXT
FOR counter = 1 TO 122 ' Loop for three seconds
PULSOUT 13, 850 ' P13 servo counterclockwise
PULSOUT 12, 650 ' P12 servo clockwise
PAUSE 20
NEXT
END
Robotics with the Boe-Bot Ch.4
1. Pt ca Boe-Bot-ul sa se deplaseze inainte roate stanga trebuie sa se roteasca invers acelor de ceas, iar cea dreapta in sensul acelor de ceas.
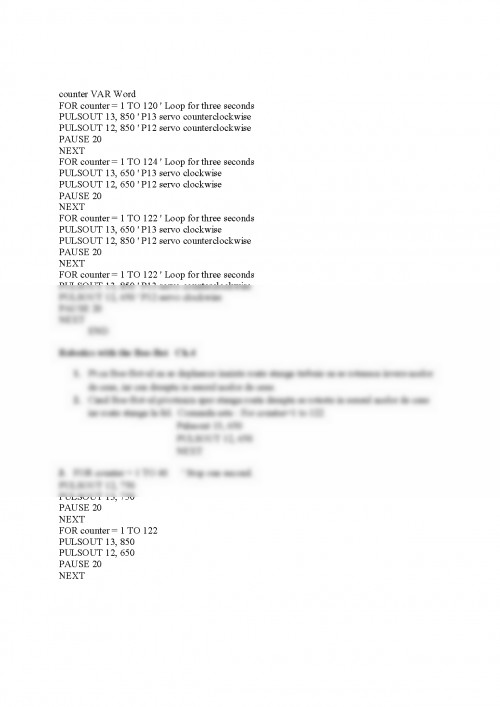
2. Cand Boe-Bot-ul pivoteaza sper stanga roata dreapta se roteste in sensul acelor de ceas iar roate stanga la fel. Comanda este : For counter=1 to 122
Pulseout 13, 650
PULSOUT 12, 650
NEXT
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.