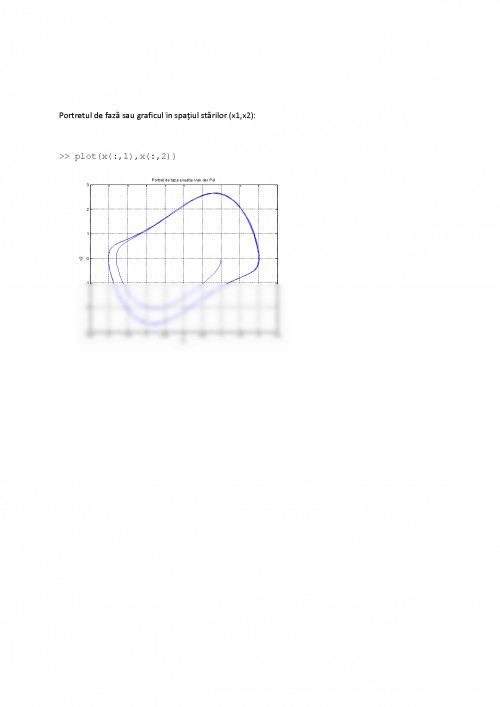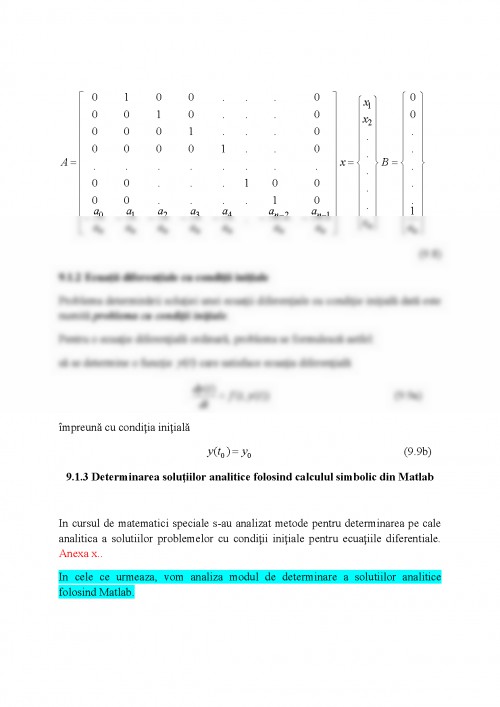
Matlab Lectia 1 Introducere & Bazele Controlului
Ce este Matlab?
• Inventat de Cleve Moler in anii 1970s pentru a usura acesul studentilor la LINPACK si EISPACK fara a trebui sa invete Fortran.
• Impreuna cu Jack Little si Steve Bangert au fondat Mathworks in 1984 si au creat Matlab.
• Matlab = matrix laboratory
1
3
The Interface
Workspace
and
Launch Pad
Command
History
and
Current
Directory
Command
Window
5
Basic Operations
• Scalar expressions
b = 10 / ( sqrt(a) + 3 )
c = cos (b * pi)
• Matrix expressions
n = m * [1 0]’
=
+
b 10
a 3
⎡ ⎤ ⎡ ⎤ ⎡ ⎤
=⎢ ⎥ ⎢ ⎥=⎢ ⎥
⎣ ⎦ ⎣ ⎦ ⎣ ⎦
1 0 1 1
n
3 4 0 3
c=cos(bπ)
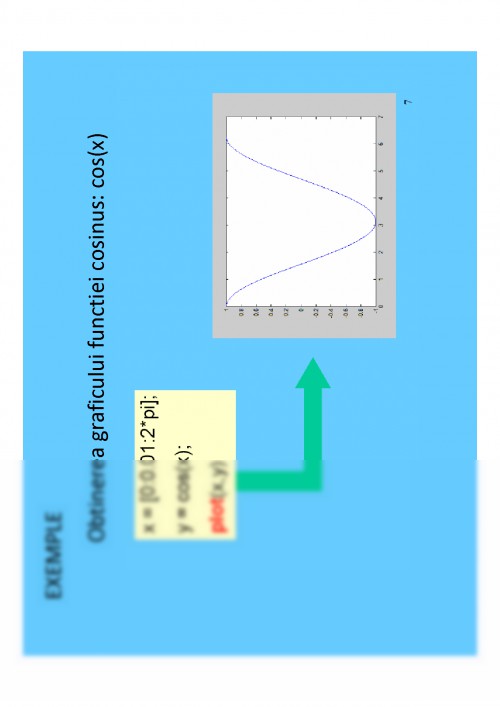
Obtinerea graficului functiei cosinus: cos(x)
EXEMPLE
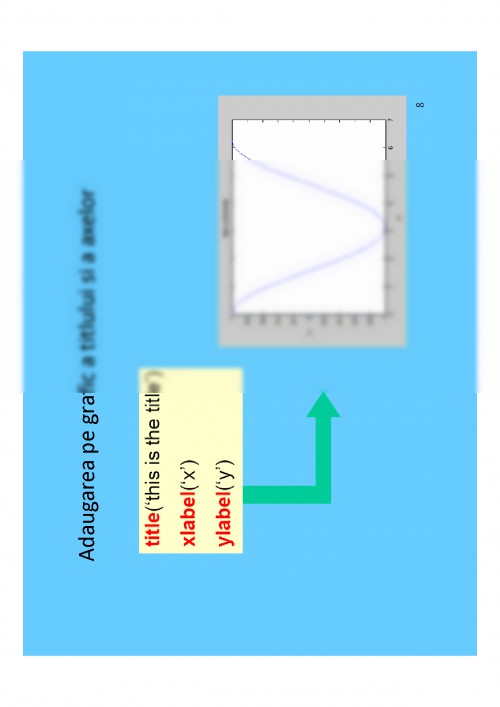
Adaugarea pe grafic a titlului si a axelor
Utilizarea graficelor in diferite rapoarte (lucrari)
• Avem trei optiuni:
1)Printam direct figura
2)Salvam ca fila JPG/BMP/TIFF si o adaugam la lucrare (File → Export…) 3) Copiem figura in clipboard si apoi o trecem in lucrare (Edit → Copy Figure ) (Edit → Paste Figure) background color use: set(gcf,’color’,’white’)
9
File Matlab “ .m” m-files • Programarea in Matlab se realizeaza prin crearea filelor cu extensia “.m” File → New → M-File • Aceste file sunt utile pentru a arhiva secvente de diferite comenzi sau pentru a definii functii noi . • Aceste file se apeleaza scriind numele cu care au fost salvate in “current directory” . • “%” se utilizeaza pentru linii care contin comentarii .
10
Alte informatii utile
• putem utiliza help pentru diferite comenzi: help <function name> afiseaza informatiile pentru functia respectiva ex.: help plot
•salvarea datelor din workspace (toate variabilele) cu save <filename> to <filename>.mat. load <filename> incarca fila cu extensia “.mat”.
11
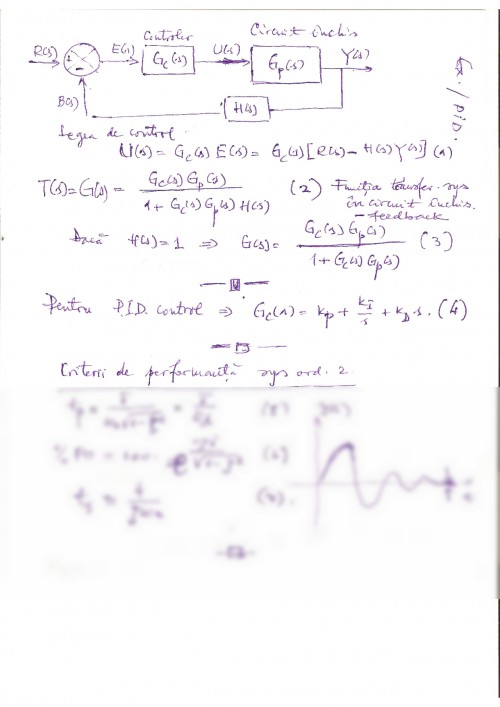
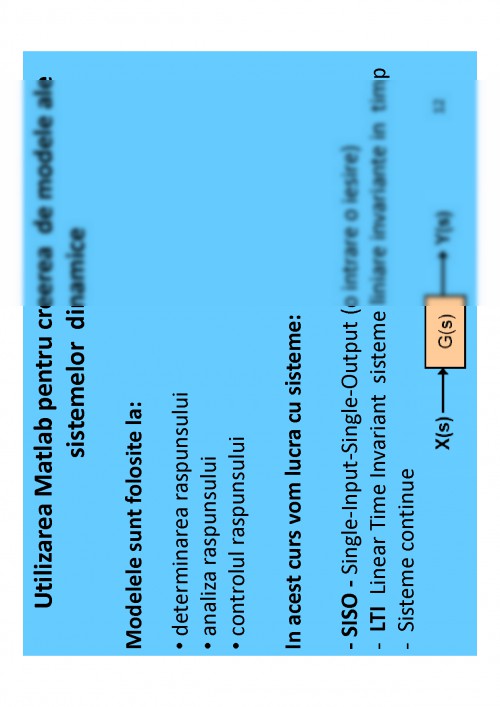
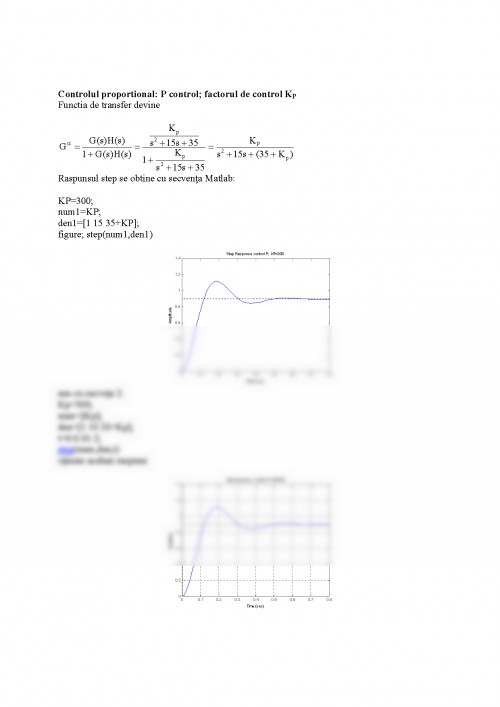
Utilizarea Matlab pentru creerea de modele ale sistemelor dinamice Modelele sunt folosite la:
• determinarea raspunsului
• analiza raspunsului
• controlul raspunsului In acest curs vom lucra cu sisteme: - SISO - Single-Input-Single-Output (o intrare o iesire)
- LTI Linear Time Invariant sisteme liniare invariante in timp - Sisteme continue
12
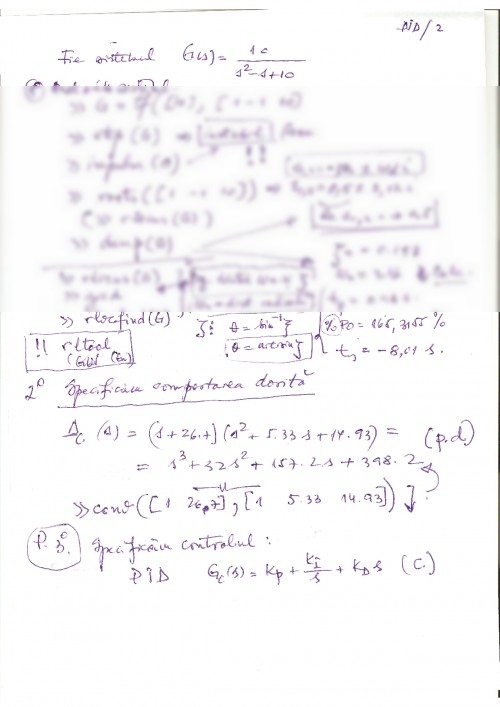
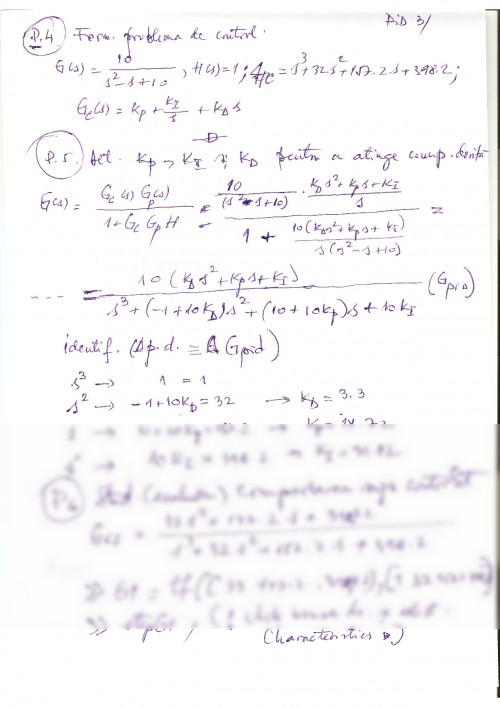
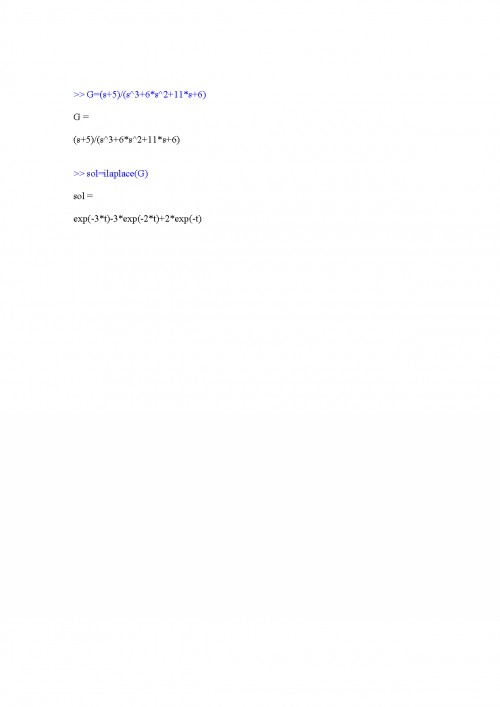
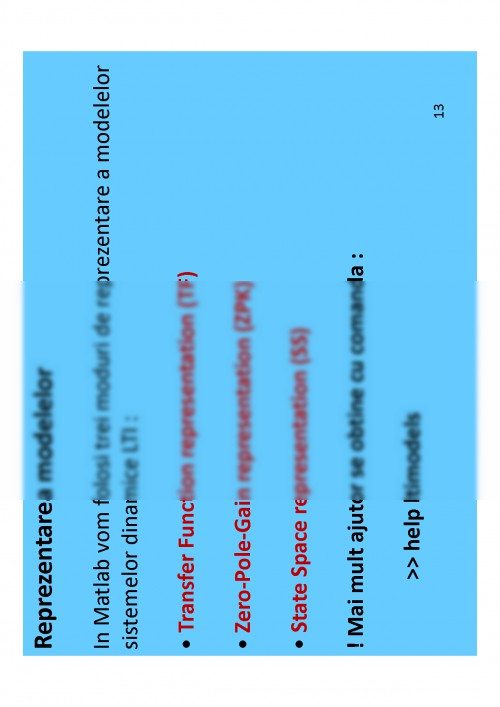
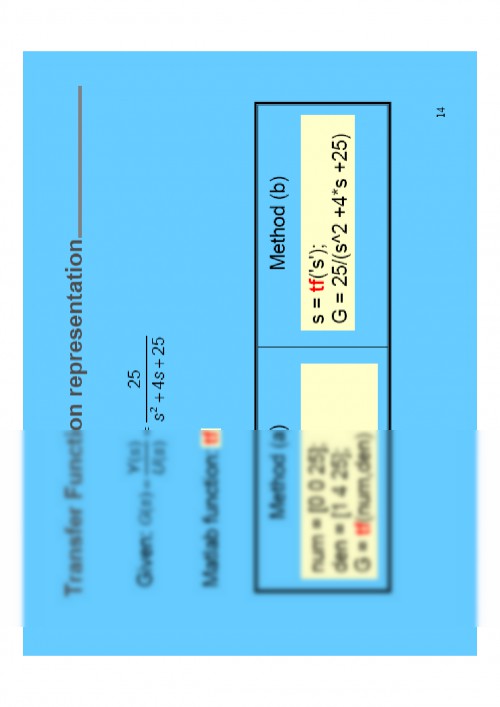
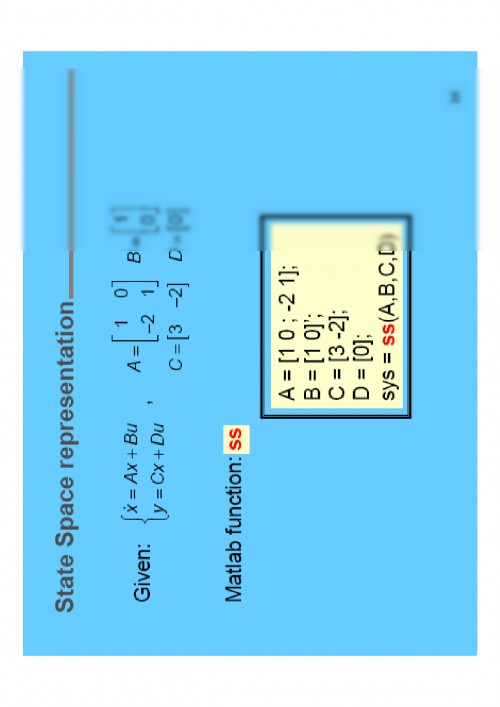
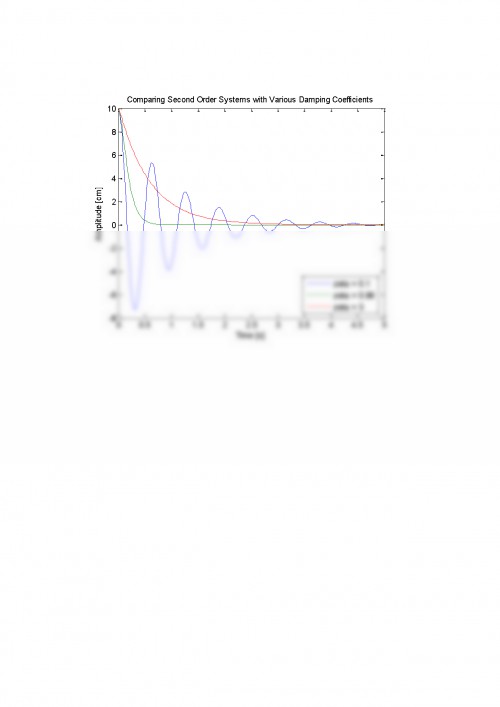
Reprezentarea modelelor In Matlab vom folosi trei moduri de reprezentare a modelelor sistemelor dinamice LTI : • Transfer Function representation (TF) • Zero-Pole-Gain representation (ZPK) • State Space representation (SS) ! Mai mult ajutor se obtine cu comanda : >> help ltimodels
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.