

1. OBIECTIVELE LUCRARII
Se determină prin încercări, pe un model simulat, performanţele obţinute de un sistem de reglare automată cu algoritm de reglare neliniar de tip bipoziţional în diferite variante de acordare a regulatorului i de rezerve de putere de execuţie. Simularea se realizeaz n mediul software de simulare SIMULSRA..
2. PREZENTARE LUCRARE
Lucrarea urmăreşte comportarea buclei de reglare automată a unui generator de aer cald al unei instalaţii de uscare. Componentele părţii fixate sunt : elementul de execuţie este un arzător de gaze cu două trepte de funcţionare, caracterizat prin puterea maximă Pmax pentru treapta 1+2 şi puterea de bază Pbaza pentru treapta 1; procesul de schimb de căldură este realizat cu un schimbător de căldură de suprafaţă de tip gaze arse-aer; traductorul de temperatură este o termorezistenţă cu teacă de protecţie.
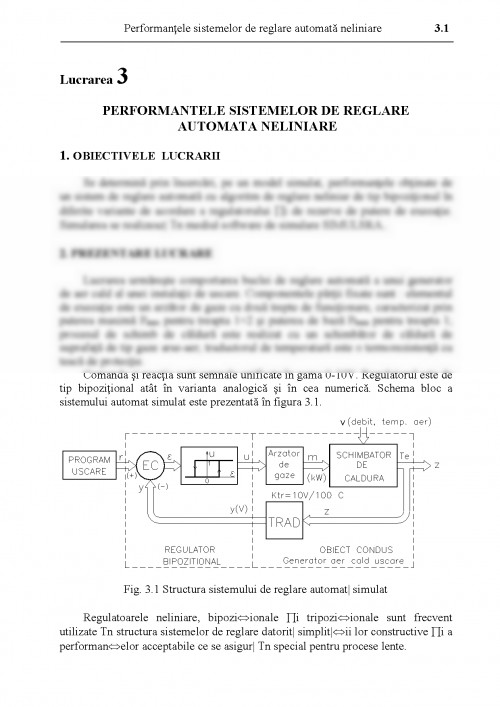
Comanda şi reacţia sunt semnale unificate în gama 0-10V. Regulatorul este de tip bipoziţional atât în varianta analogică şi în cea numerică. Schema bloc a sistemului automat simulat este prezentată în figura 3.1.
Fig. 3.1 Structura sistemului de reglare automat simulat
Regulatoarele neliniare, bipoziionale i tripoziionale sunt frecvent utilizate n structura sistemelor de reglare datorit simplitii lor constructive i a performanelor acceptabile ce se asigur n special pentru procese lente.
Caracteristica static a regulatorului bipoziional este prezentat n figura 3.2.
Mrimea caracteristic este histeresisul care este dat ca valoare relativ la referina r. Uzual se utilizeaz o caracteristic simetric fa de = 0 pentru a se obine o valoare medie a rspunsului ct mai apropiat de referina r [1,2,4].
Fig. 3.2 Caracteristica static a regulatorului bipoziional
Modelul matematic al algoritmul bipoziional n varianta analogic este de forma:
(3.1)
Modelul matematic n varianta numeric este de forma:
(3.2)
In mod uzual dezideratele de conducere a unui SRA se formuleaz din rspunsul n timp al acestuia, la mrimi de intrare precizate (variaia referinelor sau/i a perturbaiilor) din care importante sunt numai anumite elemente. In acest context se poate preciza c: performanele reprezint indici care caracterizeaz calitativ i cantitativ rspunsul unui SRA n sensul ncadrrii lui n dezideratele de conducere ca nite condiii suplimentare fa de condiiile de reglare i stabilitate intern, i avnd prin excelen un caracter ingineresc. Cnd se refer la regimul tranzitoriu ele se numesc performane de regim tranzitoriu, respectiv performane de regim staionar cnd se refer la comportarea staionar a sistemului automat. De asemenea, cnd se definesc pentru o anumit valoare a timpului performanele se numesc locale sau globale [1,2,4].
Pentru regulatoarele neliniare de tip bipoziional performanele de regim tranzitoriu se definesc pentru rspunsul sistemului la un semnal treapt, un exemplu tipic este prezentat n figura 3.3.
Principalele performane ale reglrii automate cu algoritm bipoziional sunt:
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.



