Scopul lucrării: să se proiecteze un sistem de dirijare al motorului pas-cu-pas cu posibilitatea comandării direcţiei, vitezei de rotaţie şi modului de funcţionare: fullstep sau halfstep.
Descrierea generală a motorului pas-cu-pas
Un motor pas-cu-pas este versiunea „digitală” a motorului electric. Rotorul se roteşte cu paşi discreţi după cum este comandat motorul, dar nu continuu ca un motor convenţional. Cînd este oprit dar energizat (este aplicată tensiune) stepperul menţine braţul de forţă. Acest tip de motor a fost acceptat pe larg în ultimile două decenii de electronica digitală. Driverele electrinice moderne au fost cheia acestui succes, de asemenea a influenţat şi simplitatea interfaţării cu microcontroller-ele.
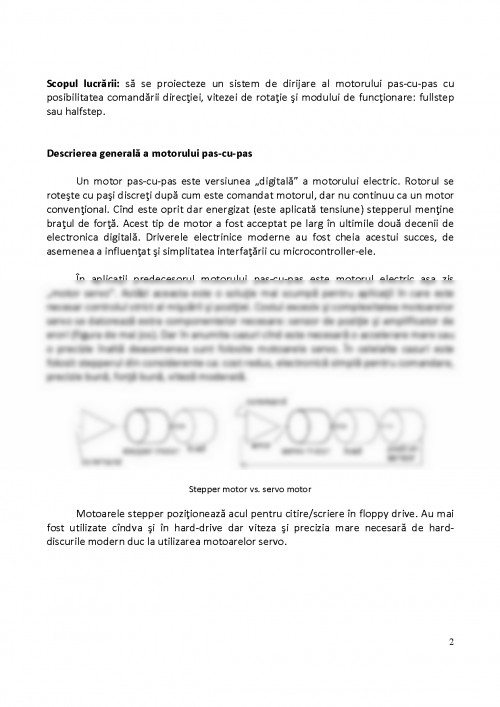
În aplicaţii predecesorul motorului pas-cu-pas este motorul electric aşa zis „motor servo”. Astăzi aceasta este o soluţie mai scumpă pentru aplicaţii în care este necesar controlul strict al mişcării şi poziţiei. Costul excesiv şi complexitatea motoarelor servo se datorează extra componentelor necesare: senzor de poziţie şi amplificator de erori (figura de mai jos). Dar în anumite cazuri cînd este necesară o accelerare mare sau o precizie înaltă deasemenea sunt folosite motoarele servo. În celelalte cazuri este folosit stepperul din considerente ca: cost redus, electronică simplă pentru comandare, precizie bună, forţă bună, viteză moderată.
Stepper motor vs. servo motor
Motoarele stepper poziţionează acul pentru citire/scriere în floppy drive. Au mai fost utilizate cîndva şi în hard-drive dar viteza şi precizia mare necesară de hard-discurile modern duc la utilizarea motoarelor servo.
Principiul de lucru al motoarelor „pas-cu-pas”
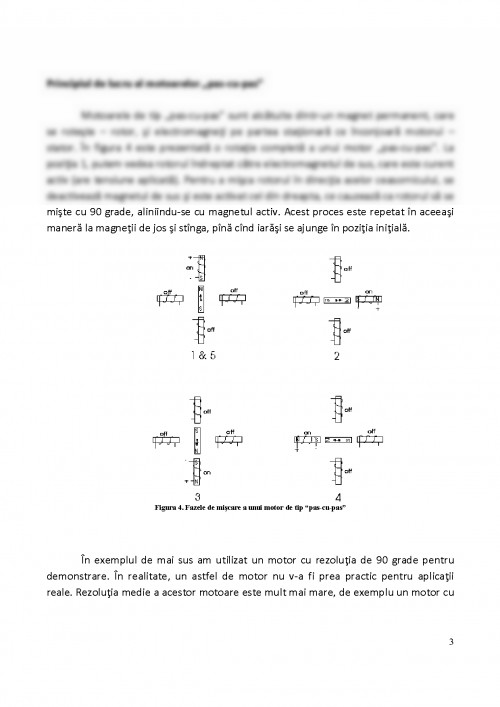
Motoarele de tip „pas-cu-pas” sunt alcătuite dintr-un magnet permanent, care se roteşte – rotor, şi electromagneţi pe partea staţionară ce înconjoară motorul – stator. În figura 4 este prezentată o rotaţie completă a unui motor „pas-cu-pas”. La poziţia 1, putem vedea rotorul îndreptat către electromagnetul de sus, care este curent activ (are tensiune aplicată). Pentru a mişca rotorul în direcţia acelor ceasornicului, se deactivează magnetul de sus şi este activat cel din dreapta, ce cauzează ca rotorul să se mişte cu 90 grade, aliniindu-se cu magnetul activ. Acest proces este repetat în aceeaşi maneră la magneţii de jos şi stînga, pînă cînd iarăşi se ajunge în poziţia iniţială.
Figura 4. Fazele de mişcare a unui motor de tip “pas-cu-pas”
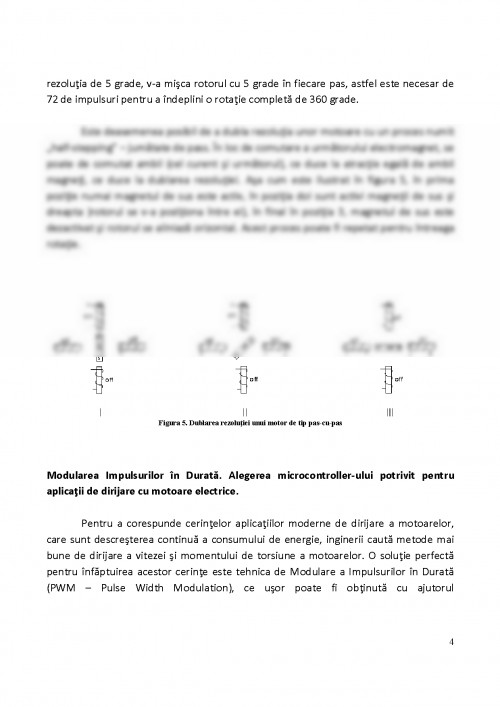
În exemplul de mai sus am utilizat un motor cu rezoluţia de 90 grade pentru demonstrare. În realitate, un astfel de motor nu v-a fi prea practic pentru aplicaţii reale. Rezoluţia medie a acestor motoare este mult mai mare, de exemplu un motor cu rezoluţia de 5 grade, v-a mişca rotorul cu 5 grade în fiecare pas, astfel este necesar de 72 de impulsuri pentru a îndeplini o rotaţie completă de 360 grade.
Universitatea Tehnică a Moldovei
Facultatea Informatică Calculatoare şi Microelectronică
Catedra Microelectronica şi Dispozitive Semiconductoare
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.