%AUTOMATIZAREA CONVENTIONALA IN VEDEREA CONDUCERII MCC
clear;clf;
echo off
%MODELUL SISTEMULUL DE ACTIONARE
%DATELE MOTORULUI
%Puterea Nominala
Pn=7980 %[W]
%Tensiunea Nominala
Un=220 %[V]
%Turatia Nominala
nn=1070 %[rot/min]
%Moment de Inertie
Jt=0.01 %[kgm^2]
%Randamentul Nominal
etan=0.89
%CALCULUL DATELOR PRINCIPALE
%Puterea Absorbita de Motor (de la retea)
P1=Pn/etan %[W]
%Curentul Nominal
Ian=P1/Un %[A]
%Pierderile in Motor
deltap=P1-Pn %[W]
%Pierderile in Cupru Nominale
pcun=deltap/2 %[W]
%Rezistenta Infasurarii Rotorice
Ra=pcun/(Ian^2); %[ohmi]
Ra=(P1-Pn)/(Ian^2) %[ohmi]
%Puterea Electromagnetica
P=Pn+deltap/2 %[W]
%Cuplul Electromagnetic
Mn=30*P/pi/nn %[Nm]
%Constanta Mecanica
kfi=Mn/Ian;
Cm=kfi;
%Constanta Electrica
kefi=pi*kfi/30;
Ce=kefi;
%Tensiunea Electromotoare
E=Ce*nn %[V]
%Verificarea Valorii Ra
Ra=(Un-E)/Ian %[ohmi]
%Moment de Volant
g=9.81
GD2=4*g*Jt %[m^2]
%Cuplul Maxim
Mmax=2*Mn %[Nm]
%Curentul Maxim Absorbit
Iamax=Mmax/Cm %[A]
%Din Identificare am Obtinut Constanta de Timp Electrica Ta
Ta=7/(10^3) %[sec]
%Inductivitatea Infasurarii Rotorice
La=Ta*Ra %[H]
%Cuplul Rezistent
Mr=1.*Mn %[Nm]
k=pi/30;Fv=0.0006;
Rezultate:
Pn = 7980
Un = 220
nn = 1070
Jt = 0.0100
etan = 0.8900
P1 = 8.9663e+003
Ian = 40.7559
deltap = 986.2921
pcun = 493.1461
Ra = 0.5938
P = 8.4731e+003
Mn = 75.6192
E = 207.9000
Ra = 0.2969
g = 9.8100
GD2 = 0.3924
Mmax = 151.2385
Iamax = 81.5117
Ta = 0.007
La = 0.0021
Mr = 75.6192
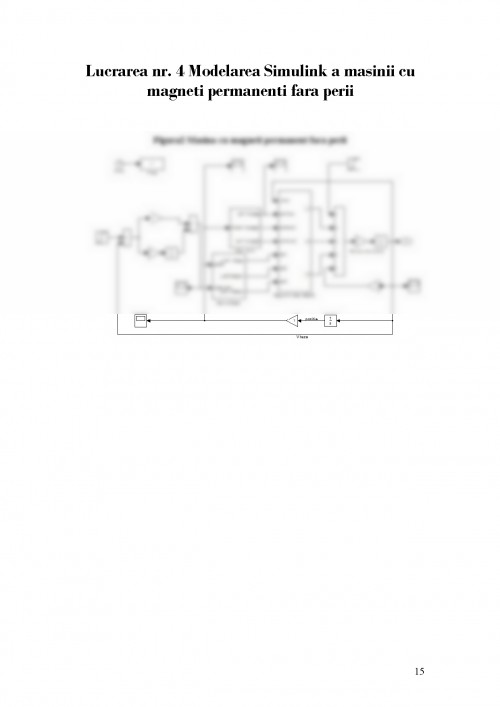
Lucrarea nr.2 Modelarea convertoarelor statice
%ACORDAREA OPTIMALA A BUCLEI DE CURENT
%(circuitul de acordare al modulului - varianta KESSLER)
%Pt. MCC
ka=1/Ra %[1/ohmi]
%Factorul de Amplificare al Traductorului de Curent
ki=10/Iamax
%Constanta de Timp a Traductorului
Ti=0.003 %[sec]
%Factorul de Amplificare a Convertorului cc-cc
kd=Un/10
%PARAMETRII DE ACORD AI REGULATORULUI PI
%Suma Constantelor de Timpi Paraziti in Bucla de Curent
Tsi=Ti
%Coeficient de Proportionalitate al Regulatorului PI
taul=Ta %[sec]
%Factorul de Amplificare al Regulatoreului de Curent PI
k1=1/(2*Tsi*kd*ka*ki)
%Constanta de Timp a Filtrului pe Marimea Impusa
Tf1=Ti %[sec]
UNIVERSITATEA „Dunărea de Jos” GALAŢI
Facultatea de Automatică, Calculatoare, Inginerie Electrică şi Electronică
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.