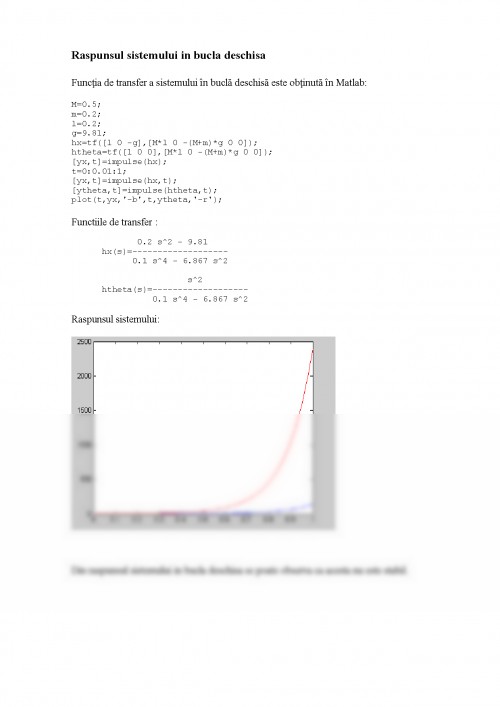

Pendulul invers este instabil în orice moment într-o singură direcţie, în afară de faptul când se aplică o forţă de reglare corespunzătoare. Aceasta se aplică la căruciorul de masă M. Pendul inversat este ataşat unui cărucior care este translatat de-a lungul axei OX cu ajutorul unui motor, astfel încât acesta să rămână în poziţie verticală. Acest sistem poate fi descris prin figura de mai jos:
unde:
l = lungimea pendulului;
m = masa pendulului;
M = masa căruciorului;
θ = unghiul de deviaţie al pendulului faţă de poziţia verticală;
u = comanda motorului asupra căruciorului.
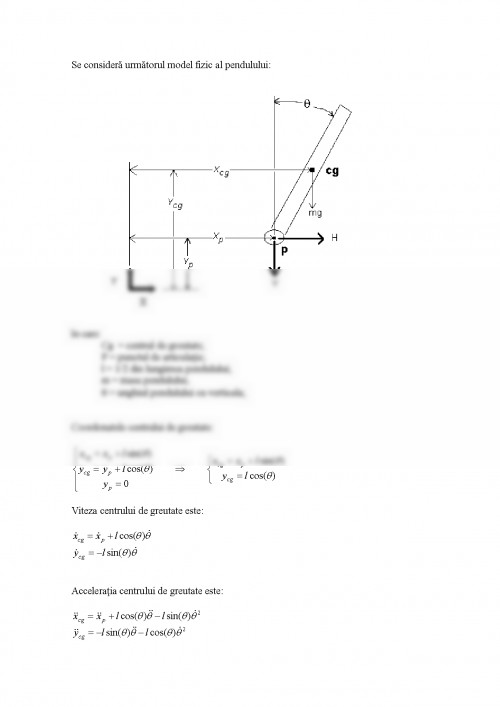
Se consideră următorul model fizic al pendulului:
în care:
Cg = centrul de greutate;
P = punctul de articulaţie;
l = 1/2 din lungimea pendulului;
m = masa pendulului;
= unghiul pendulului cu verticala;
Coordonatele centrului de greutate:
Viteza centrului de greutate este:
Acceleraţia centrului de greutate este:
Aplicând legea a doua a lui Newton în direcţia x a mişcării, avem:
Aplicând legea a doua a lui Newton la mişcarea de rotaţie obţinem:
Pendulul invers trebuie păstrat vertical, de aceea se face presupunerea că şi sunt cantităţi mici, astfel încât
Ecuaţiile se pot liniariza astfel:
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.