Consideratii geometrice si cinematice
G=22
α=300+i=36[rad]
β= α+250=61[rad]
AC=25+5i[mm]=55[mm]
AB=20+4i[mm]=44[mm]
AD=60+6i[mm]=96[mm]
i=6
Dispozitivul de echilibrare consta dintr-un ansamblu de arcuri elicoidale de compresiune care sunt montate pretensionat intr-o carcasa. Carcasa este articulata in punctul B(B’) Bratul rbotului AC este articulat in punctul A si este actionat de o forta de gretate G aplicata in punctul C. In pozitia initiala, forta de pretensionare din arc F0 echilibreaza forta de greutate Gla unghiul α.
Se va determina F0.
Exhilibrarea trebuie sa aiba loc si pentru unghiul β cand arcurile sunt comprimate la maxim, prin intermediul fortei Fmax. In pozitia a doua de lucru, pentru unghiul β, avem:
Se va determina Fmax.
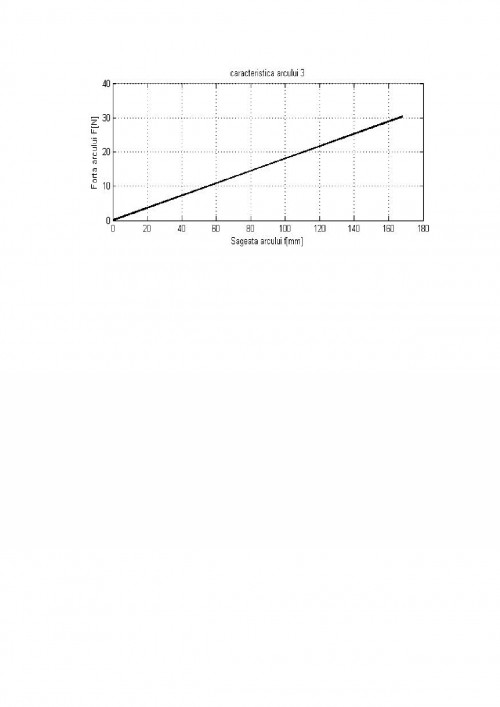
Deformaţia arcului elicoidal între cele două poziţii va fi:
Această deformaţie a sistemului de arcuri se poate xprima prin intermediul constantei elastice echivalente kech şi a variatie forţei din resorturi între cele două poziţii limită:
Se va dtermina kech.
Sistemul cuprinde trei arcuri legate în paralel, având rigidităţile k1, k2, k3, între care există relaţii de dependenţă, după cum urmează:
Arcurile sunt legate în paralel, prin urmare:
Se vor determina constantele elastice ale celor trei arcuri.
Se calculează forţele maxime, respectiv minime, ce solicită fiecare arc elicoidal:
, pentru i = 1,2,3
, pentru i = 1,2,3
Unde Fmax,i sunt forţele maxime din arcurile date, iar Fo,i sunt forţele de pretensionare din aceleaşi arcuri.
Calculul de alegere a arcurilor
Arcurile se confecţionează din oţel de arc CoSi15A, conform STAS 795-77, cu următoarele proprietăţi:
τat = 700 MPa; G = 85.103 MPa;
2.1 Alegerea diamtrelor sârmelor
Dimensionarea arcurilor se face cu relaţia:
unde Fmax = forţa maximă ce solicită arcul elicoidal; i = indicele de înfăşurare al arcului, i = D/d; D = diametrul de înfăşurare al sârmei; d = diametrul sârmei arcului; c = coeficient de siguranţă, .
Pentru arcuri se aleg indicii de înfăşurare astfel: arcule exterior: i1 = 12, arcul din mijloc: i2 = 11; arcul din interior i3 = 10.
Se vor calcula diametrele sârmelor arcurilor, iar valorile obţinute se vor rotunji superior la valori ISO.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.