1.Calc.rezist la inaintare-in mom.deplasarii corpurilor sau a echipaj. apare o forta.Dc deplasarea are loc la nivelul solului,at forta care treb invinsa de catre sisitemul propulsor se num.rezist la inaintare(W)si are forma-la deplasare prin glisare W=Gxµ
- la deplasare pe role W=G( *d+2f/D)* unde:G-greutatea corp,d-diam.axului rolei,f-bratul frecarii de rostogolire,D-diametru rotii, -coef.de frecare in lagare(desen)
Cuplul de rotatie: *f+ G*d/2=W*D/2; W=G(2f+d* )/D. Rezist.la inaintare intra in calculul puterii de antrenare a propulsorului a resp.utilaj.
Calc.puterii statice a propulsorului: = (W* / * ) unde: -coef.de suprasarcina; -viteza de transp.;η-randam.lantului de antrenare.
=w*G(sin + cos ); =w*G(sin - cos );w-rezist specif la inaintare
2.Utilaje de basculare-se fol.datorita princip.de fctionare in zone din sectoarele ind.unde bascularea este necesara.(desen)
*a= *b = *b/2
= *r*cos ; = *b/a*r*cos ,cuplul de rotatie -este de fapt forta din bila
3.Calulul general ale mecanism.-orice tip de echipament,utilaj install are aceleasi compon.generale care il ajuta sa fctioneze.El va fi alcat.din-un motor,un lant cinematic de antrenare,masina de lucru propiu zisa.Lantul cinematic este reprez.de redactor care poate avea o treapta sau mai multe de reducere a vitezei de rot.Masina de lucru poate fi-un tambur,un mecanism de rasturnare,cilindri de lucru de la cajele de laminare.Legatura intre motor,redactor,masina de lucru se face prin intermediul cuplajelor:-cu fictiune,bolturi,gheare.Aceste cuplaje transmit o misc.de rotatie caract.prin viteza de rotatie de la subansamblul conducator la cel condus.Aceste cuplaje pot fi separate dar misc.poate fi transmisa prin ambreiaje.Motorul fction.cu putere,pot fi motoare electrice in c.c sau c.a;motorul poate fi unul cu actionare electrica sau cu ardere prin scanteie. = * * )/9550[kw]-putere specif a motorului.
Un lant cinematic este caract.printr-un randament si transport de transmitere “i”.Toate rezistentele sunt sub actiunea fortei de gravitatie si in mom.fctionarii acestei forte apar cuplurile rezistente si fortele de frecare,dat.greutatii. = *i* ; i= / unde i-rap de transmitere.Pt a frana utilajul se fol 2 sisteme de franare = * ; =(G )* /375 +9,75 *
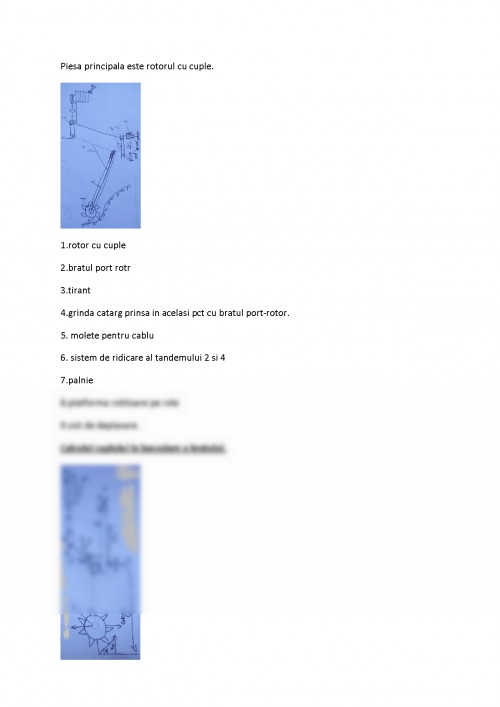
4.Platforma rotitoare pe role: platformele rotitoare au in componenta platforma propriu-zisa pe care se afla sarcinile ce trebuiesc rotite de la pct A la un pct B. Antrenarea propriu-zisa a platformei se face prin antrenarea directa dinre un pinion cilindric sau tronic ce primeste miscarea de rotatie si cuplul aferent de la sist motor reductor si o coloana dintata cu dinti drepti sau inclinati, fixata la periferia paltformei rotitoare.
CD-coroana dntata
CRS- cale de rulare superioara
GC-grup conic
M-motor
R-reductor
RS- role de sprijin
Pso=kd*
MR1=(Gp+Gm+GCD+GCRS)*Dmr/2* *α’
=w
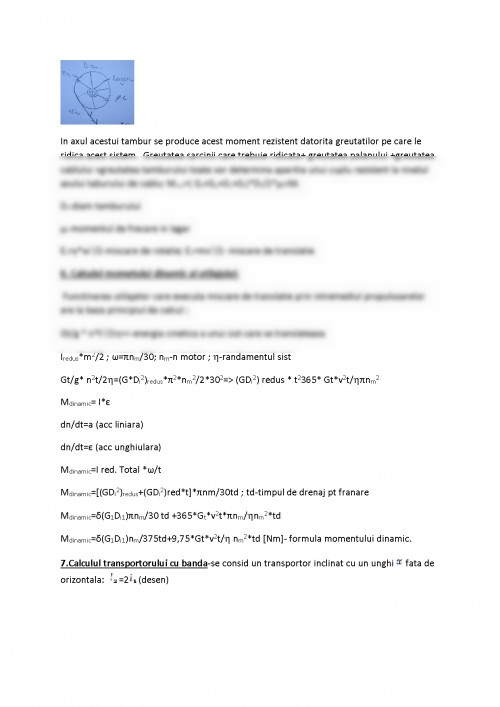
µe-coef de frecare in role
Dm diametrul mediei al rolei
f- bratul frecarii de rostogolrie a rolelor
MR- momentul rezistent
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.