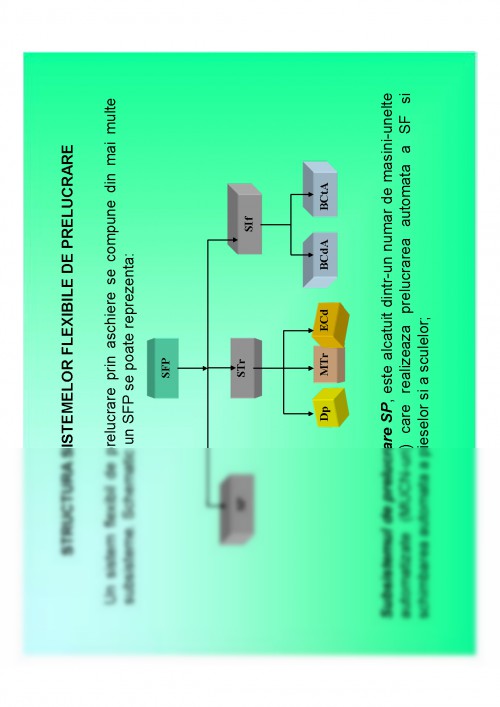
STRUCTURA SISTEMELOR FLEXIBILE DE PRELUCRARE
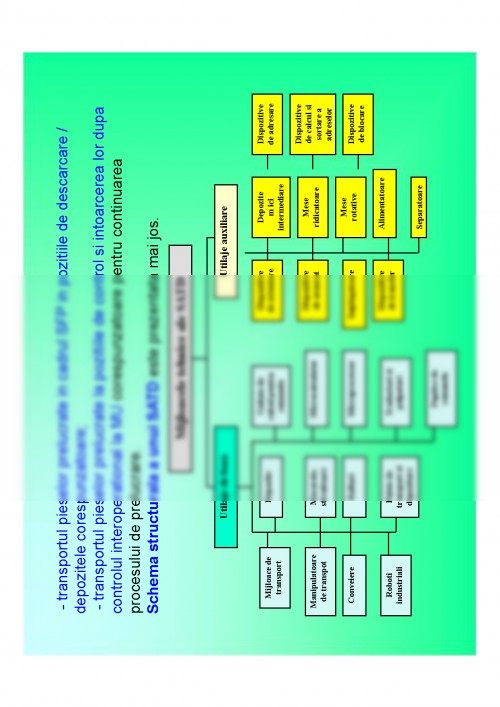
Un sistem flexibil de prelucrare prin aschiere se compune din mai multe subsisteme. Schematic un SFP se poate reprezenta:
SFP
SP
STr
SIf
Dp
MTr
ECd
BCdA
BCtA
Subsistemul de prelucrare SP, este alcatuit dintr-un numar de masini-unelte automatizate (MUCN-uri) care realizeaza prelucrarea automata a SF si schimbarea automata a pieselor si a sculelor;
Subsistemul de transfer STrse compune din:Dp–depozitul din care se alimenteaza sistemul de prelucrare;MTr–mecanismul de transfer al SF in mod automat pe masinia-unealta corespunzatoare;ECd–echipamentul de comanda care realizeaza corelarea intre deplasarea pieselor de catre sistemul de transfer si ciclul de prelucrare a acestora.
Subsistemul informational SIfeste compus din doua blocuri functionale:BCdA–bloc de comanda automata a subsistemelor SP si STr;BCtA-bloc de control automat al functionarii sistemului flexibil, prin culegerea si prelucrarea informatiilor (datelor) provenite din exploatarea acestuia.
Definirea stucturii SFP trebuie sa raspunda urmatoarelor probleme:-determinarea operatiilor de prelucrarerentabil de executat pe masinile-unelte integrate in sistem;-tipul si numarul masinilor-uneltecare se integreaza in mod rentabil in sistem;-caracteristicile masinilor-unelte(curse de lucru, gama de turatii si avansuri, putere de antrenare etc.);-precizia de prelucrareposibil a se obtine;-suprafata ocupatasi spatiile intre elementele sistemului;-asigurarea fluxuluide scule, SF si a celui informational.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.