1.CONSIDERAŢII PRELIMINARE
- Mecatronica este ştiinţa ce studiază totalitatea principiilor, metodelor şi mijloacelor necesare realizării produselor care înglobează componente mecanice, electrice şi electronice în vederea asigurării unui grad cît mai înalt de calitate.
- Robotica, ca parte a mecatronicii, este ştiinţa şi tehnica concepţiei şi construcţiei roboţilor [LAR 93].
- Principala materializare a roboticii este robotul care reprezintă un sistem (produs) mecatronic cu aspect mai mult sau mai puţin uman capabil să execute activităţi specifice omului sau care s-ar putea realiza în manieră umană.
- Dintre subsistemele robotului se poate identifica ca un subsistem complex şi important sistemul de prehensiune, care la rândul său este un sistem mecatronic.
- În prezent sistemul de prehensiune se utilizează în special la roboţii industriali.
- Robotul industrial este maşina automată reprogramabilă care îndeplineşte funcţii variate specifice omului în procesul de producţie [DUD 87].
Fig.1.1 Componentele robotului ca sistem mecatronic
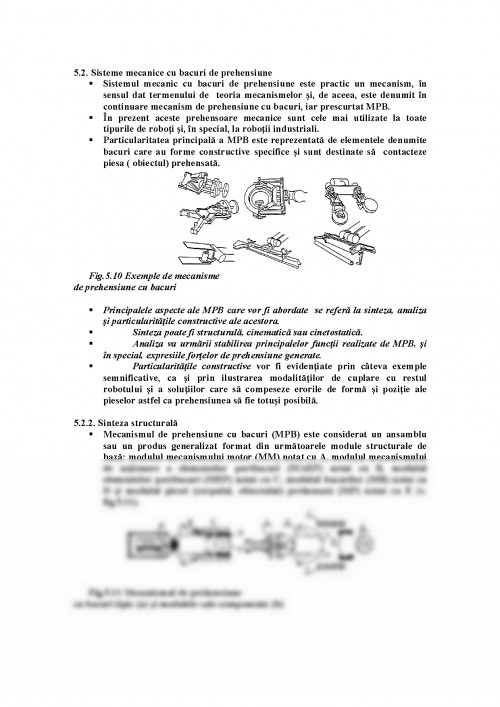
2.PREHENSIUNEA ŞI SISTEMUL DE PREHENSIUNE
- Prehensiunea ca acţiune specifică roboticii înseamnă interacţiunea dintre un robot şi un corp (obiect-piesă) în vederea manipulării-transferului corpului de către robot dintr-o poziţie în alta (fig. 2.1).
- Prehensiunea este realizată de către robot prin intermediul prehensorului.
Fig.2.1 Elementele prehensiunii Fig.2.2 Fazele prehensiunii
- Prehensiunea - acea parte a operaţiilor robotizate în care se realizează:
- Ø poziţionarea şi centrarea prehensorului faţă de obiect, în faza de apucare,
- Ø rigidizarea elementelor de execuţie (contact) cu obiectul,
- Ø menţinerea rigidizării în timpul procesului tehnologic de manipulare ,
- Ø poziţionarea prehensorului împreună cu obiectul şi
- Ø desprinderea prehensorului de obiect, care să rămână în poziţie prestabilită"
2.2. Sistemul de prehensiune
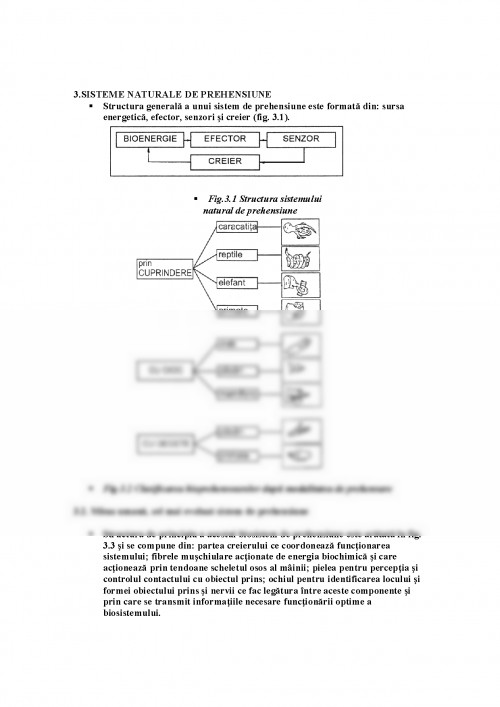
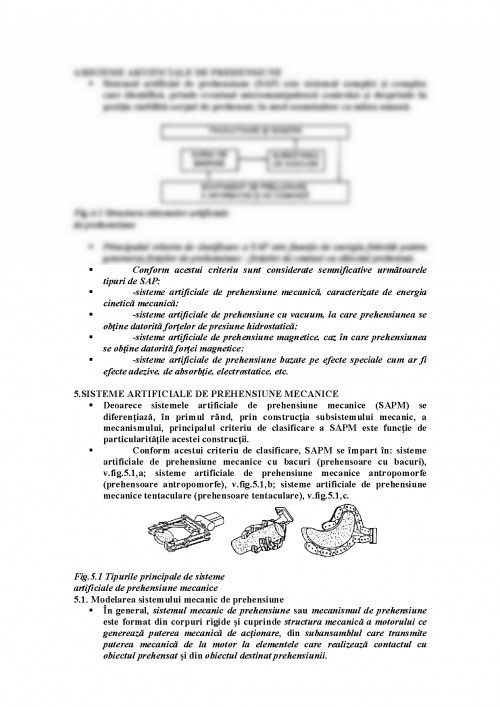
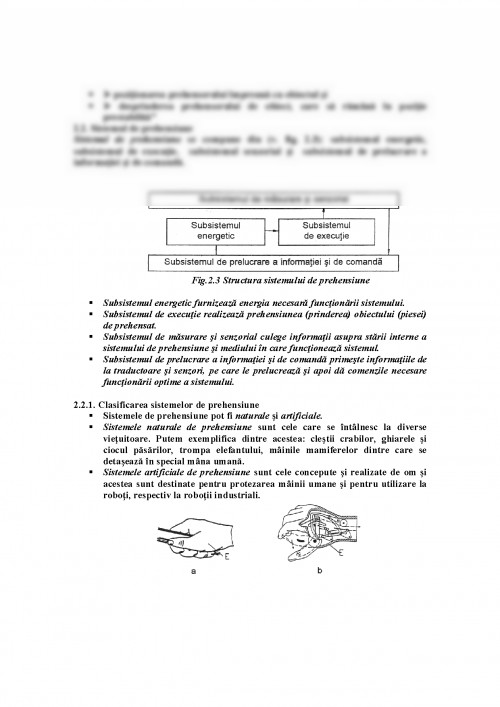
Sistemul de prehensiune se compune din (v. fig. 2.3): subsistemul energetic, subsistemul de execuţie, subsistemul senzorial şi subsistemul de prelucrare a informaţiei şi de comandă.
Fig.2.3 Structura sistemului de prehensiune
- Subsistemul energetic furnizează energia necesară funcţionării sistemului.
- Subsistemul de execuţie realizează prehensiunea (prinderea) obiectului (piesei) de prehensat.
- Subsistemul de măsurare şi senzorial culege informaţii asupra stării interne a sistemului de prehensiune şi mediului în care funcţionează sistemul.
- Subsistemul de prelucrare a informaţiei şi de comandă primeşte informaţiile de la traductoare şi senzori, pe care le prelucrează şi apoi dă comenzile necesare funcţionării optime a sistemului.
2.2.1. Clasificarea sistemelor de prehensiune
- Sistemele de prehensiune pot fi naturale şi artificiale.
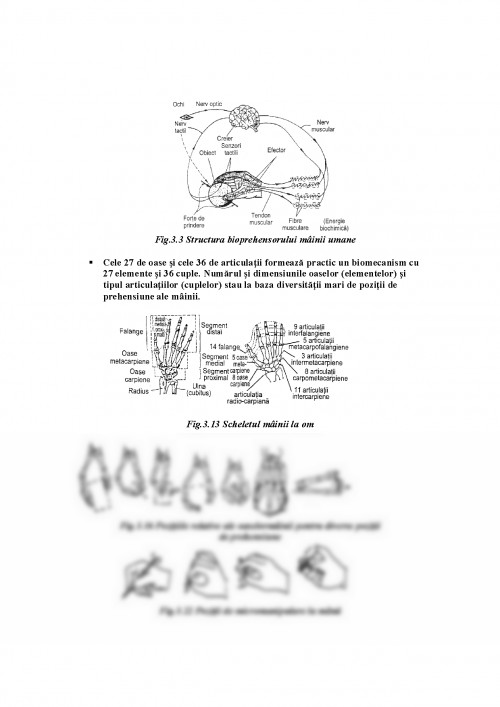
- Sistemele naturale de prehensiune sunt cele care se întâlnesc la diverse vieţuitoare. Putem exemplifica dintre acestea: cleştii crabilor, ghiarele şi ciocul păsărilor, trompa elefantului, mâinile mamiferelor dintre care se detaşează în special mâna umană.
- Sistemele artificiale de prehensiune sunt cele concepute şi realizate de om şi acestea sunt destinate pentru protezarea mâinii umane şi pentru utilizare la roboţi, respectiv la roboţii industriali.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.