Tema 1. Introducere. Principiile mecanicii clasice. Modele teoretice folosite în mecanică. Sisteme de unităţi de măsură. Punct material liber. Compunerea forţelor concurente. Echilibrul punctului material liber. Punctul material supus la legături. Echilibrul punctului material. Legile frecării.
1.1. NOŢIUNI INTRODUCTIVE
Mecanica clasică este ştiinţa care studiază echilibrul şi mişcarea corpurilor materiale şi se bazează pe câteva principii fundamentale formulate de către Isaac Newton (1643-1727):
– principiul I (inerţiei): un corp îşi păstrează starea de repaus sau de mişcare rectilinie uniformă atâta timp cât asupra sa nu acţionează alte corpuri care să-i modifice această stare;
– principiul al II-lea (acţiunii forţei): forţa care se exercită asupra unui corp îi imprimă acestuia o acceleraţie direct proporţională cu masa corpului, având direcţia şi sensul forţei aplicate:
– principiul al III-lea (acţiunii şi reacţiunii): dacă un corp (i) acţionează asupra altui corp ( j) cu o forţă numită acţiune, cel de-al doilea corp acţionează asupra primului cu o forţă numită reacţiune: , egală şi de sens contrar:
Mecanica tehnică este disciplina care studiază principiile şi legile mecanicii clasice şi aplicaţiile practice ale acestora în tehnică.
Din punct de vedere didactic MECANICA se împarte în trei părţi:
– STATICA: studiază sistemele de forţe şi echilibrul corpurilor;
– CINEMATICA: studiază mişcarea corpurilor fără a lua în considerare forţele şi masele sistemului;
– DINAMICA: studiază mişcarea corpurilor materiale ţinând seama de forţele care acţionează asupra acestora.
1.2. SISTEMUL INTERNAŢIONAL DE UNITĂŢI
În anul 1960 la „a XI-a Conferinţă Generală de Măsuri şi Greutăţi“ a fost adoptat Sistemul Internaţional de Unităţi. Sistemul Internaţional (SI) este un sistem de unităţi general, coerent şi practic pentru toate domeniile ştiinţei şi tehnicii. Unităţile de măsură din afara Sistemul Internaţional sunt numeroase.
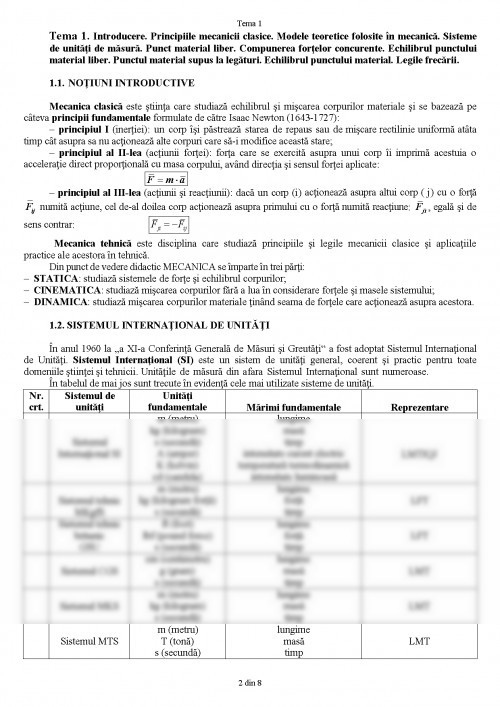
În tabelul de mai jos sunt trecute în evidenţă cele mai utilizate sisteme de unităţi.
Nr.
crt. Sistemul de
unităţi Unităţi
fundamentale
Mărimi fundamentale
Reprezentare
1
Sistemul Internaţional SI m (metru)
kg (kilogram)
s (secundă)
A (amper)
K (kelvin)
cd (candela) lungime
masă
timp
intensitate curent electric temperatură termodinamică intensitate luminoasă
LMTIQJ
2
Sistemul tehnic
MKgfS m (metru)
kg (kilogram forţă)
s (secundă) lungime
forţă
timp
LFT
3 Sistemul tehnic
britanic
GSU ft (foot)
lbf (pound force)
s (secundă) lungime
forţă
timp
LFT
4
Sistemul CGS cm (centimetru)
g (gram)
s (secundă) lungime
masă
timp
LMT
5
Sistemul MKS m (metru)
kg (kilogram)
s (secundă) lungime
masă
timp
LMT
6
Sistemul MTS m (metru)
T (tonă)
s (secundă) lungime
masă
timp
LMT
1.3. DEFINIŢII
Punctul material este un punct geometric caracterizat prin masă.
O mulţime de puncte materiale aflate în interacţiune mecanică formează un sistem de puncte materiale.
Corpul material sau mediul continuu reprezintă o infinitate de puncte materiale ce ocupă în mod continuu un anumit domeniu din spaţiu astfel încât un element de spaţiu oricât de mic din acest domeniu finit conţine materie.
Solidul rigid este corpul material care poate prelua sarcini exterioare oricât de mari fără să se deformeze.
1.4. SISTEME DE REFERINŢĂ. GRAD DE LIBERTATE
Prin sistem de referinţă se înţelege un reper faţă de care se determină poziţia unui corp material.
Cel mai utilizat sistem de referinţă este sistemul triortogonal drept.
Definirea poziţiei unui corp material, în raport cu sistemul de referinţă adoptat, se face cu un anumit număr de parametri geometrici (distanţe, unghiuri) care se numesc coordonate.
Un sistem material care poate ocupa orice poziţie în spaţiu se numeşte sistem material liber.
Sistemul material supus la unele restricţii geometrice se numeşte sistem material supus la legături.
Prin grad de libertate a unui punct material, sistem de puncte materiale etc., se înţelege numărul de parametri geometrici independenţi necesari pentru a defini poziţia acestuia.
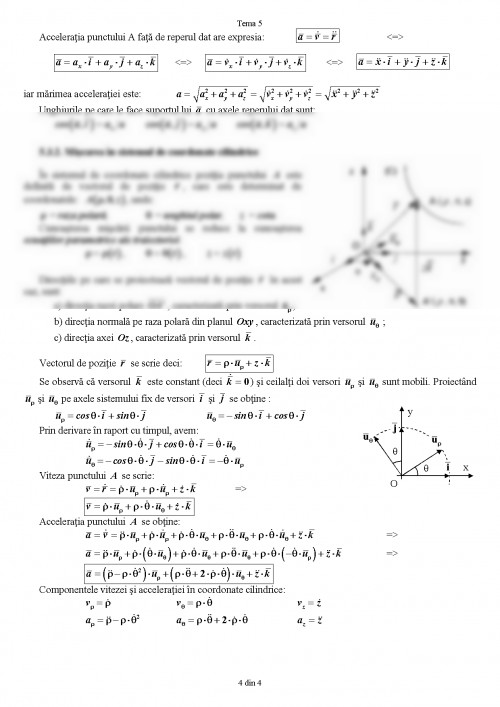
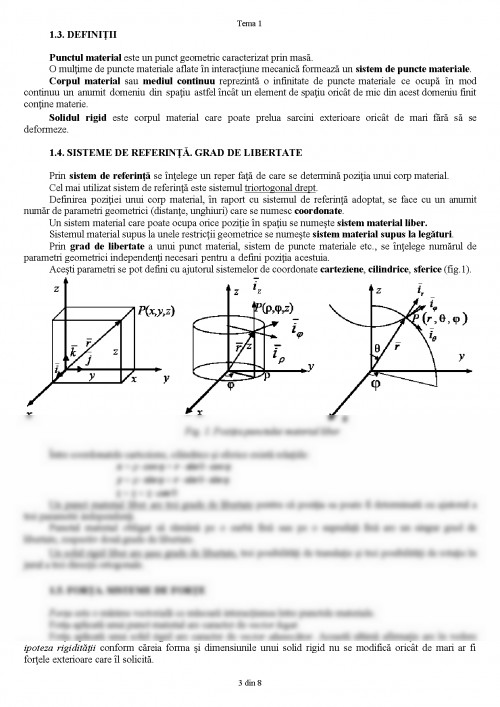
Aceşti parametri se pot defini cu ajutorul sistemelor de coordonate carteziene, cilindrice, sferice (fig.1).
Fig. 1. Poziţia punctului material liber
Între coordonatele carteziene, cilindrice şi sferice există relaţiile:
Un punct material liber are trei grade de libertate pentru că poziţia sa poate fi determinată cu ajutorul a trei parametri independenţi.
Punctul material obligat să rămână pe o curbă fixă sau pe o suprafaţă fixă are un singur grad de libertate, respectiv două grade de libertate.
Un solid rigid liber are şase grade de libertate, trei posibilităţi de translaţie şi trei posibilităţi de rotaţie în jurul a trei direcţii ortogonale.
1.5. FORŢA. SISTEME DE FORŢE
Forţa este o mărime vectorială ce măsoară interacţiunea între punctele materiale.
Forţa aplicată unui punct material are caracter de vector legat.
Forţa aplicată unui solid rigid are caracter de vector alunecător. Această ultimă afirmaţie are în vedere ipoteza rigidităţii conform căreia forma şi dimensiunile unui solid rigid nu se modifică oricât de mari ar fi forţele exterioare care îl solicită.
După natura lor forţele cu care operează mecanica tehnică se pot clasifica în:
– forţe exterioare: forţele efectiv aplicate corpului;
– forţe interioare: forţele aceluiaşi sistem ce se exercită potrivit principiului acţiunii şi reacţiunii;
– forţe de legătură: forţele care înlocuiesc legăturile geometrice impuse unui punct dintr-un sistem material.
După modul de acţiune al forţelor, ele se pot clasifica în:
– forţe concentrate: forţele cu acţiune punctuală;
– forţe distribuite: forţe ce revin unei porţiuni elementare de volum, suprafaţă sau liniare.
Prin sistem de forţe se înţelege o mulţime de forţe care acţionează asupra unui punct sau sistem de puncte materiale. Sistemele de forţe pot fi: concurente; coplanare; paralele; cupluri; oarecare.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.