1.1. METODA ANALITICǍ. POZIŢII FINIT VECINE
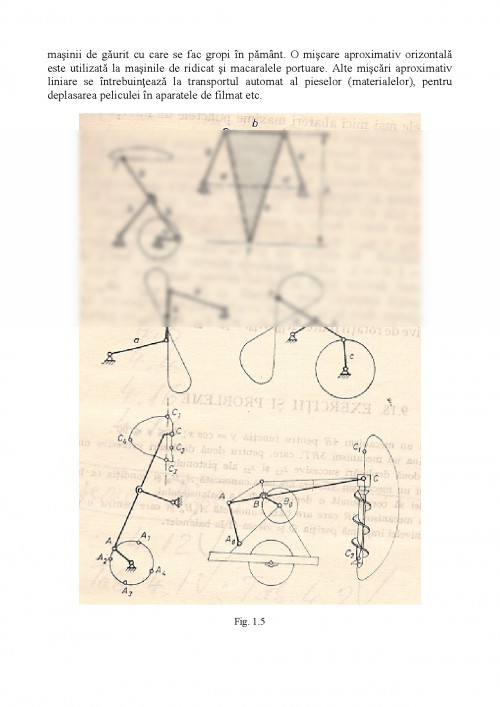
În unele situaţii, necesitǎţile industriei impun ca o piesǎ sǎ ocupe mai multe poziţii distincte date. Piesa de prelucrat, utilizatǎ într-un montaj sau care are un rol funcţional în poziţiile respective, este supusǎ deci unui program rigid de mişcǎri alternante uneori cu staţionǎri. Aceste cerinţe se pot realiza, în anumite condiţii limitative, prin sistemele mecanice mobile cele mai simple cu patru elemente: mecanismul bielǎ – manivelǎ, mecanismul patrulater articulat, mecanismul cu culisǎ oscilantǎ etc. Pentru necesitǎţi superioare, cu flexibilitǎţi mari în ceea ce priveşte varietatea mişcǎrilor şi adaptarea diverselor procese tehnologice, se întrebuinţeazǎ manipulatoare sau mecanisme – roboţi cu automatizǎri superioare.
În conformitate însǎ cu construcţia mecanismelor amintite mai sus, piciorul bielei – pistonul – de la mecanismul bielǎ – manivelǎ are o mişcare rectilinie iar butoanele de manivelǎ sau balansier de la mecanismul patrulater articulat au mişcǎri circulare. În aceste cazuri trebuie gǎsite puncte în planul mobil – bielǎ care au poziţiile lor coliniare sau circulare. Însǎ mişcarea planului mobil între poziţiile date nu este impusǎ sau cel mult este limitatǎ din punctul de vedere al vitezelor şi acceleraţiilor. Câteodatǎ este posibil sǎ se aleagǎ mişcarea astfel încât proiectarea sǎ fie optimǎ în raport cu alte cerinţe. Dar, deocamdatǎ, se cere numai o sintezǎ geometricǎ de poziţii.
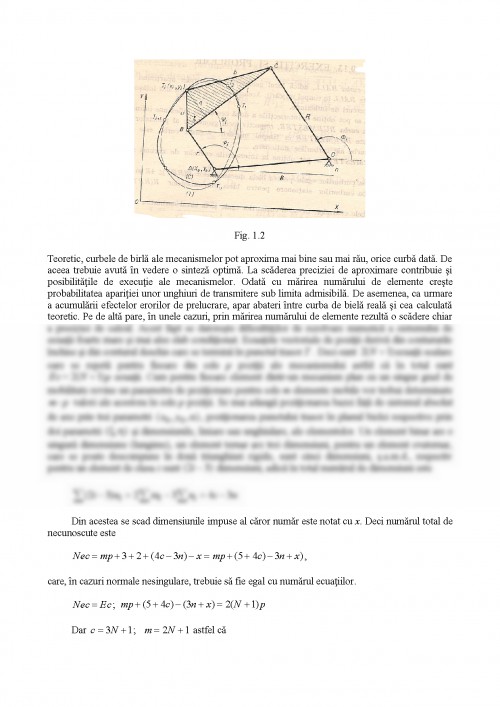
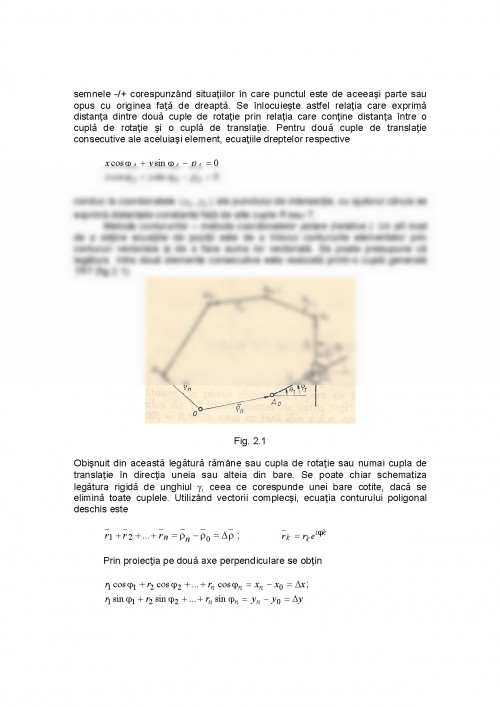
Fig. 1.1
Se noteazǎ prin indicele i (a nu se confunda cu puterea i) poziţiile planului mobil (fig.1.1) pentru care sunt cunoscute valorile
respectiv coordonatele unui punct – origine O şi unghiurile de rotaţie ale mobilului faţǎ de reperul fix. Un punct de coordonate în planul mobil are în planul fix coordonatele astfel
Dacǎ se urmǎreşte ca poziţiile unor puncte din planul mobil sǎ fie coliniare sau circulare este necesar ca aceste coordonate sǎ verifice ecuaţiile corespunzǎtoare
În continuare se rezolvǎ proiectarea de la douǎ la cinci poziţii.
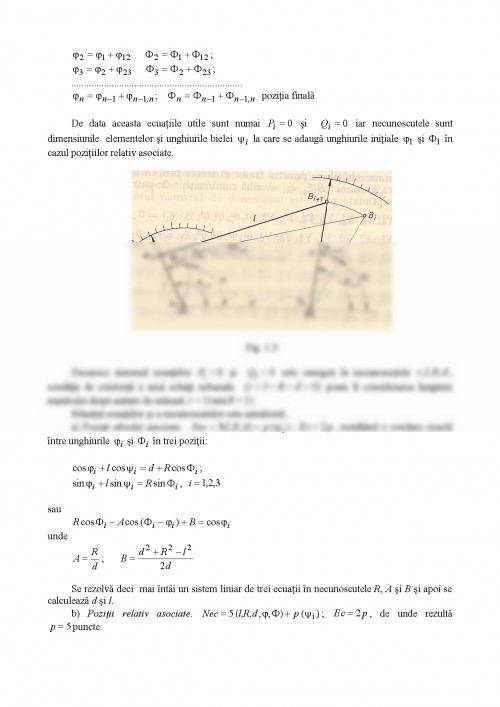
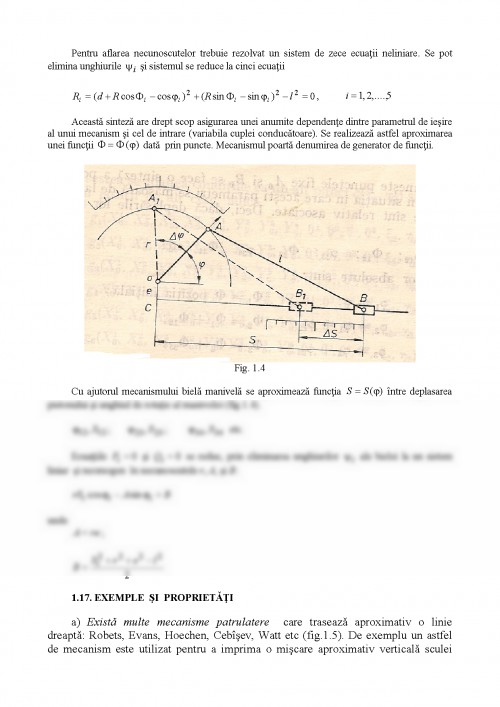
1.2. PROIECTAREA MECANISMULUI BIELǍ – MANIVELǍ
În proiectarea biopoziţionalǎ se cere sǎ se determine punctele planului mobil, care în douǎ poziţii ale acestuia sunt situate pe câte o dreaptǎ. Desigur rǎspunsul este cǎ toate punctele planului mobil au douǎ poziţii pe câte o dreaptǎ. În funcţie de punctul ales se determinǎ dreapta aflându-se coeficienţii din ecuaţiile
adicǎ
Impunerea unor condiţii suplimentare reduce posibilitǎţile de sintezǎ, respectiv se reduce numǎrul punctelor planului mobil care le satisfac.
a) Douǎ poziţii aliniate de direcţie datǎ. Faţǎ de situaţia anterioarǎ se cere în plus ca dreapta celor douǎ poziţii sǎ aibǎ o direcţie impusǎ m. Deci punctele planului mobil trebuie să satisfacǎ relaţia:
Aceste puncte, în planul mobil, formeazǎ locul geometric , denumit dreapta bipoziţiilor direcţionate 2M sau mai corect dreapta punctelor cu douǎ poziţii situate pe direcţia m.
b) Douǎ poziţii aliniate de centru dat. Dacǎ dreapta celor douǎ poziţii trebuie sǎ treacǎ prin centrul trebuie sǎ se îndeplineascǎ a treia relaţie de forma
Înlocuirea expresiilor coeficienţilor A şi B în relaţia de mai sus conduce la locul geometric , care este cercul bipoziţiilor centrale 2Q, sau, mai corect, cercul punctelor planului mobil care au douǎ poziţii situate pe drepte concurente în centrul C.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.