
CAPITOLUL I
SISTEME DINAMICE LINIARE
1.1 Reprezentarea in spatiul stãrilor
1.1.1 Sisteme dinamice liniare continue
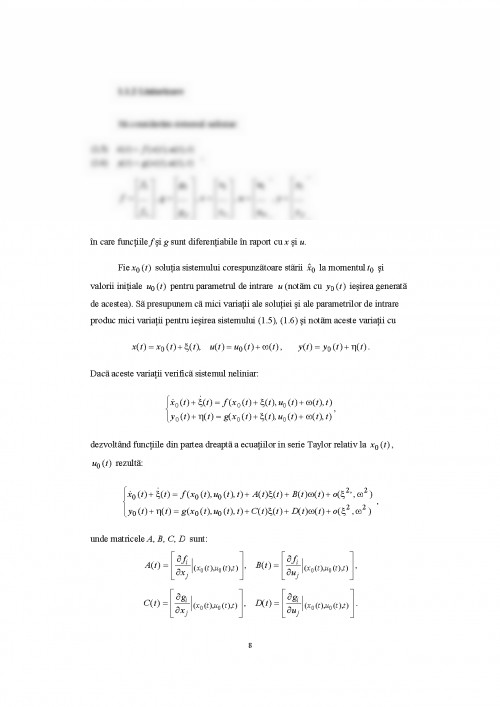
Un sistem (dinamic) liniar continuu (SLC sau chiar SL când nu existã pericol
de confuzie) este o retea cu un numãr finit de receptori pentru intrare, care primesc
semnale externe si cu un numãr finit de terminale de iesire, cu ajutorul cãrora se pot
mãsura sau observa iesirile (rezultatele); reteaua insãsi constã dintr-un numãr finit de
componente primare interconectate unele cu altele, cu receptorii de intrare si cu
terminalele de iesire. Multimea consideratã pentru variabila timp este T = R
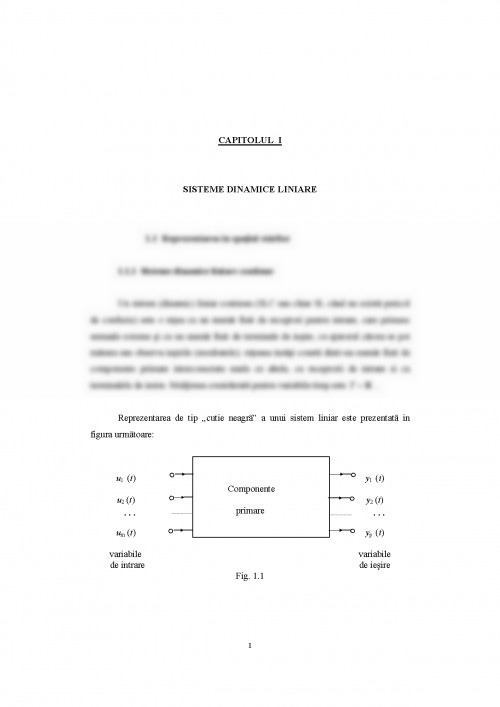
Reprezentarea de tip „cutie neagrã” a unui sistem liniar este prezentatã in
figura urmãtoare:
u1 (t) y1 (t)
Componente
u2 (t) y2 (t)
primare
um (t) yp (t)
variabile variabile
de intrare de iesire
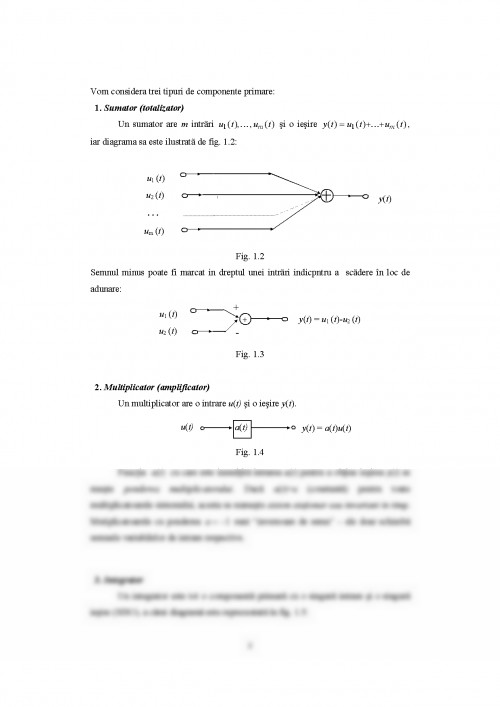
Vom considera trei tipuri de componente primare:
1. Sumator (totalizator)
Un sumator are m intrãri u1(t ),K,um(t ) si o iesire y(t ) = u1(t )+K+um(t) ,
iar diagrama sa este ilustratã de fig. 1.2:
Fig. 1.2
Semnul minus poate fi marcat in dreptul unei intrãri indicpntru a scãdere în loc de
adunare:
Fig. 1.3
2. Multiplicator (amplificator)
Un multiplicator are o intrare u(t) si o iesire y(t).
Fig. 1.4
Functia a(t) cu care este inmultitã intrarea u(t) pentru a obtine iesirea y(t) se
nueste ponderea multiplicatorului. Dacã a(t)=a (constantã) pentru toate
multiplicatoarele sistemului, acesta se numeste sistem stationar sau invariant in timp.
Mutiplicatoarele cu ponderea a = −1 sunt “inversoare de semn” – ele doar schimbã
semnele variabilelor de intrare respective.
3. Integrator
Un integrator este tot o componentã primarã cu o singurã intrare si o singurã
iesire (SISO), a cãrei diagramã este reprezentatã în fig. 1.5:
u(t) a(t) y(t) = a(t)u(t)
u1 (t)
u2 (t)
Fig. 1.5
Relatia între functiile de intrare si de iesire este datã de:
Aceastã relatie este echivalentã cu y&(t) = u(t) , deci un model mai usor de
folosit este:
Fig. 1.6
Iesirea integratorului i al unui SL, notatã xi (t), se numeste variabilã de stare.
Dacã un SL contine n integratoare (notate 1, n) vectorul
poartã numele de vectorul de stare (starea) sistemului.(la
momentul t), iar n se numeste dimensiunea sistemului.
Capitolul 1 - Sisteme dinamice liniare
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.