
1.2 Limbajul Matlab/Scilab si programul Control Kit
Matlab = laborator matricial (apare anual , costa cca 10000$ si nu se vinde in toate statele)
Scilab = scientific laboratories (este gratuit, fiind o clona a Matlab-ului ; pe CD avem variantele 2.6 , 2.7 si 2.72)
Obs. Scilab 2.6 este asociat cu programul Control Kit 1.31, iar Scilab 2.7 cu Control Kit 1.32 .
La instalare , Scilab 2.6 din exe , va fi instalat in ->exec (c:/ProgramFiles/Scilab2.6/Probe/exemple.sci) .
www.scilab.org
Scilab
--> 1+2
ans=3
--> y=2?3
y=8
--> x=y*(7,5+2)/1?3;
-->help sin
-->exec (c:/Program Files/Scilab2.6/Probe/exemple.sci)
exemplu sci
a=2
b=3
x=(a+b)?2
-->y
y=7
-->A=[1,2;3,4]+[5,6;7,8]
+ +
A= | 6 8 |
| 10 12 |
+ +
-->y=[7+j?0]
x*y=(a+jb)*(c+jd)
Control Kit 1.31 are mai multe programe ; incarcarea se poate face automat, la pornirea programului (pentru asta, se va copia tot continutul fisierului in Scilab2.6).
=>enter Kit ( ) to start (comanda de pornire a programului)
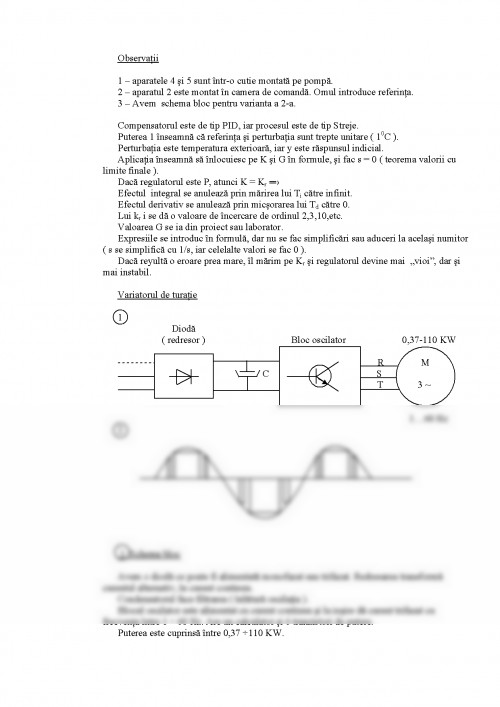
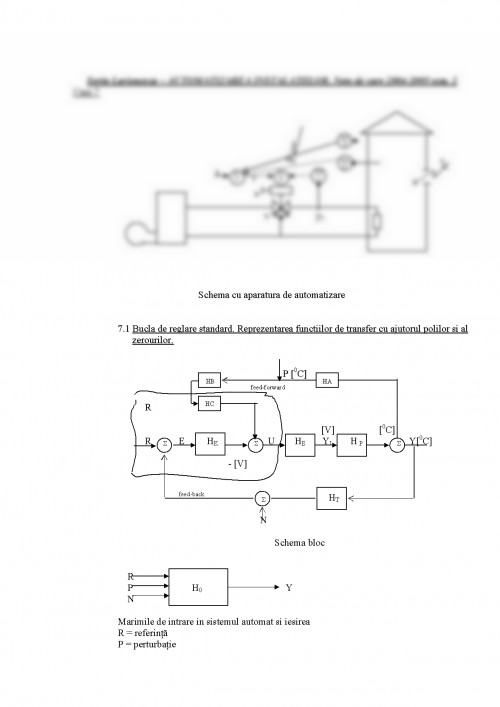
1.3 Schema tehnologica De Dietrich
Schema nu foloseste standardele internationale si romanesti pentru specificarea aparaturii de automatizare . Are un nivel superior de management format dintr-un PC , la care pot fi conectate toate elementele de automatizare , o magistrala BAS (grup de placute imprimate Rx10 => cablu de Internet la 100MHz). Alimentarea se face la 230V monofazic, cu cablu ecranat.
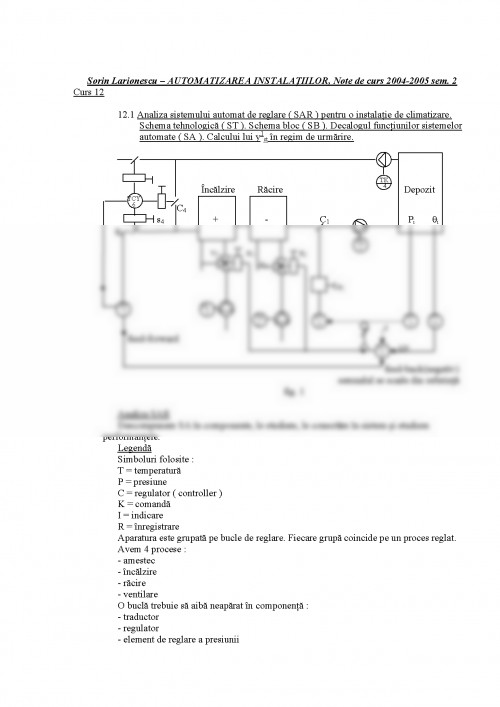
Fiecare schema are o legenda :
- numerele pina la 100 sunt numere Dietrich , iar urmatoarele 10 sunt date de prof.dr.ing. Larionescu;
- circuitele electrice sunt reprezentate prin linii, iar aparatele electrice prin cerculete;
- a fost introdus aparatul 300 (automatul);
- aparatele 200 si 100 sunt regulatoare de temperatura (TC);
- TC51 este un regulator de temperatura ( robinet termostatic)
- BT302 realizeaza supravegherea flacarii;
- 101 =servomotor;
- TT = traductoare
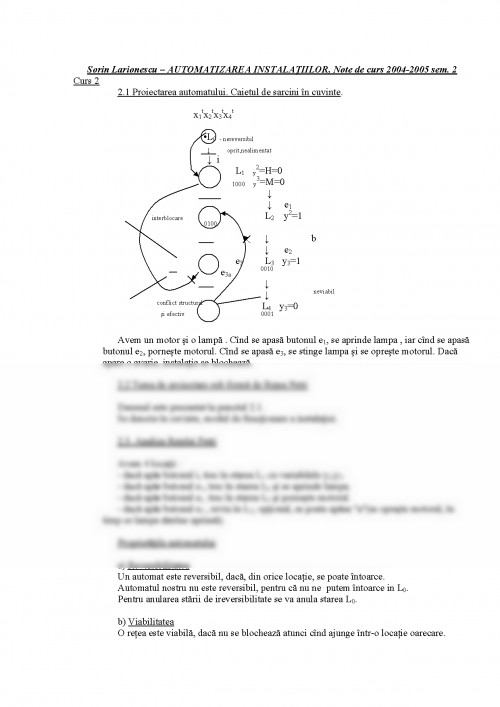
2.1 Proiectarea automatului. Caietul de sarcini in cuvinte.
x1tx2tx3tx4t
oL0 - nereversibil
? oprit,nealimentat
? i
L1 y2=H=0
1000 y3=M=0
?
? e1
interblocare L2 y2=1
0100
? b
? e2
e3 L3 y3=1
e3a 0010
?
? neviabil
conflict structural L4 y3=0
si efectiv 0001
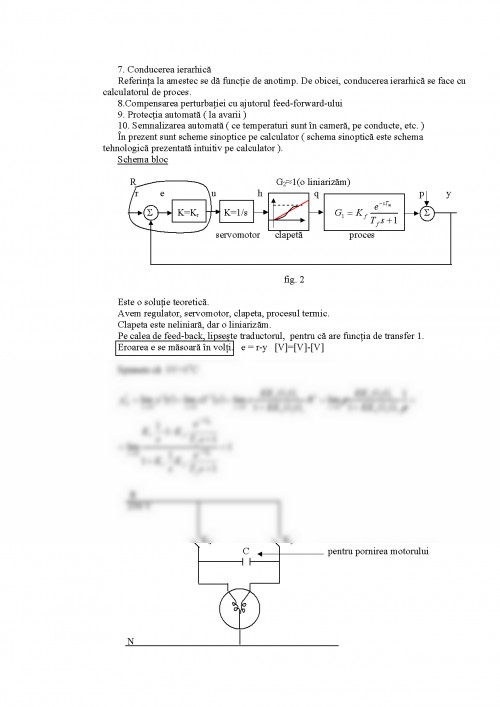
Avem un motor si o lampa . Cind se apasa butonul e1, se aprinde lampa , iar cind se apasa butonul e2, porneste motorul. Cind se apasa e3, se stinge lampa si se opreste motorul. Daca apare o avarie, instalatia se blocheaza.
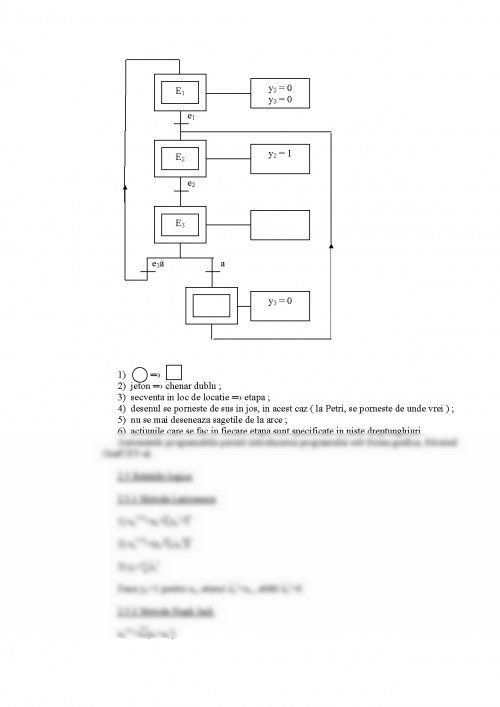
2.2 Tema de proiectare sub forma de Retea Petri
Desenul este prezentat la punctul 2.1.
Se descrie in cuvinte, modul de functionare a instalatiei.
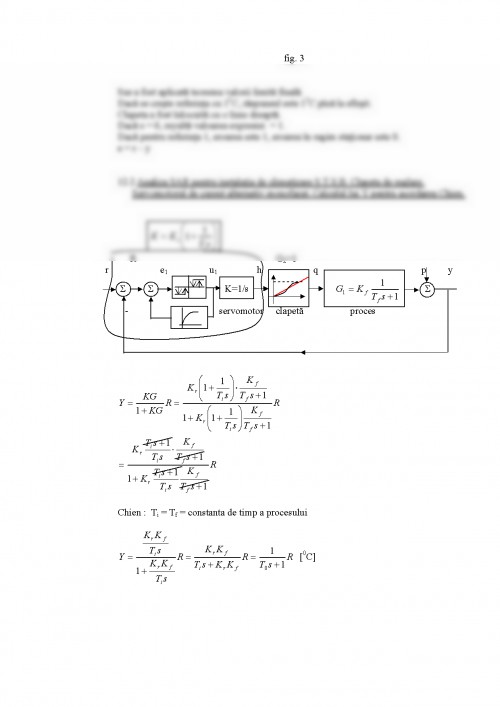
2.3. Analiza Retelei Petri
Avem 4 locatii :
- daca apas butonul i, trec in starea L1 cu variabilele y2;y3.
- daca apas butonul e1, trec in starea L2 si se aprinde lampa.
- daca apas butonul e2 , trec in starea L3 si porneste motorul.
- daca apas butonul e3 , revin in L1; optional, se poate apasa "a"(se opreste motorul, in timp ce lampa ramine aprinsa).
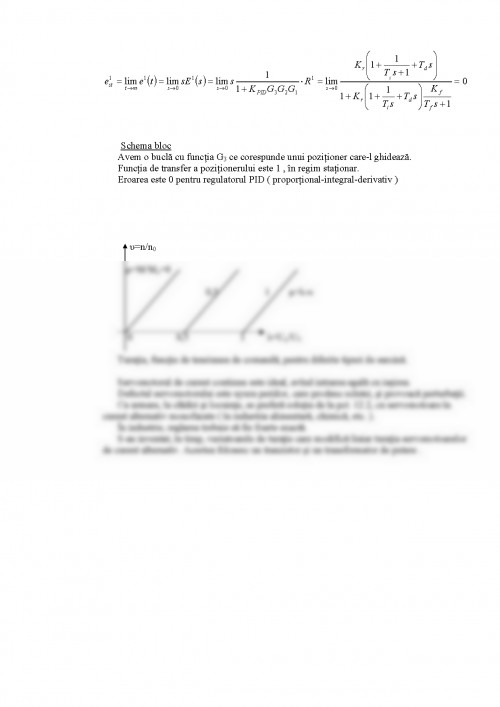
Proprietatile automatului
a) Reversibilitatea
Un automat este reversibil, daca, din orice locatie, se poate intoarce.
Automatul nostru nu este reversibil, pentru ca nu ne putem intoarce in L0.
Pentru anularea starii de ireversibilitate se va anula starea L0.
b) Viabilitatea
O retea este viabila, daca nu se blocheaza atunci cind ajunge intr-o locatie oarecare.
Automatul nu este viabil, pentru ca, daca a ajuns in L4, se blocheaza. El devine viabil daca se duce un arc = buton (b) , desenat cu albastru , din L4. La apasarea butonului b, ne intoarcem in L1.
La proiect vor aparea avarii specifice, care vor cere solutii specifice.
Curs complet
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.