1. PREZENTAREA GENERALĂ A SISTEMULUI
Cuvinte cheie: tracţiune electrică, troleibuz, motor asincron, convertor DC/AC, PWM, sistem de reglare, control vectorial, model matematic, observator, regulatoare, traductoare de tensiune, curent şi viteză.
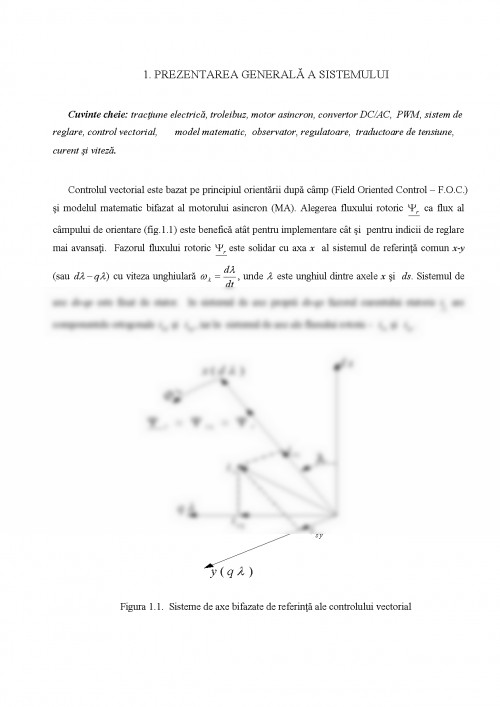
Controlul vectorial este bazat pe principiul orientării după câmp (Field Oriented Control – F.O.C.) şi modelul matematic bifazat al motorului asincron (MA). Alegerea fluxului rotoric ca flux al câmpului de orientare (fig.1.1) este benefică atât pentru implementare cât şi pentru indicii de reglare mai avansaţi. Fazorul fluxului rotoric este solidar cu axa x al sistemul de referinţă comun x-y (sau cu viteza unghiulară , unde este unghiul dintre axele x şi ds. Sistemul de axe ds-qs este fixat de stator. In sistemul de axe proprii ds-qs fazorul curentului statoric are componentele ortogonale şi , iar în sistemul de axe ale fluxului rotoric - şi .
Figura 1.1. Sisteme de axe bifazate de referinţă ale controlului vectorial
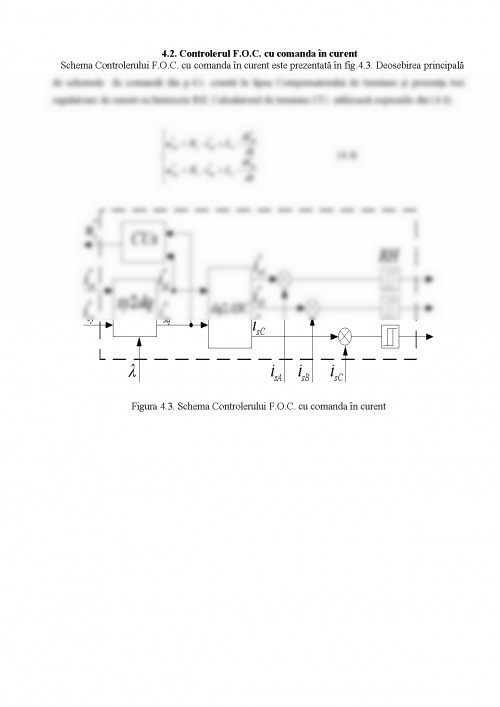
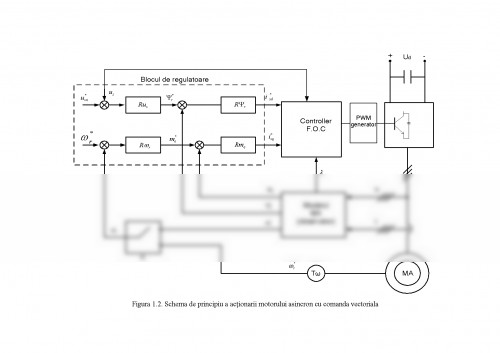
Sistemul de tracţiune al troleibuzului cu motor asincron şi control vectorial (fig.1.2) este format din convertorul DC/AC (invertor PWM), motor asincron şi sistemul de control vectorial, traductoare de tensiuni şi curenţi statorici, traductor de viteză. Sistemul de control vectorial funcţional este constituit din Blocul de regulatoare, Obersvatorul de stare (modelul matematic) al MA, Controlerul F.O.C. La elaborarea sistemului de control al motorului asincron este necesar de ţinut cont de tipul sarcinii de antrenare. În cazul examinat caracteristica mecanică a sarcinii - a troleibuzului de pasageri – dependenţa vitezei unghiulare de cuplul sarcinei - reprezintă o funcţie de tipul hiperbolei influenţată de mai mai mulţi factori de trafic.
Bucla de reglare a mişcării mecanice conţine doua regulatoare: regulatorul vitezei rotorice Rωr şi regulatorul cuplului electromagnetic Rme (primul generează cuplului electromagnetic prescris ,, iar la al doilea – curentul prescris activ ).
Bucla de reglare a fluxului este constituit din regulatorul de tensiune Rus (necesar slăbirii de flux la funcţionarea cu viteze suprasincrone) şi regulatorul de flux RΨr, cu ieşirile respective: fluxul rotoric si curentul reactiv statoric prescrise.
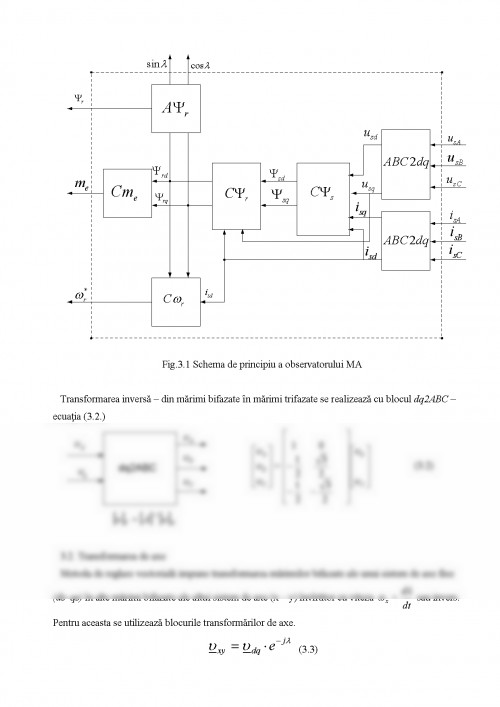
Blocul „Modelul MA (observator)” serveşte pentru estimarea poziţiei λ si modulului fluxului rotoric, a cuplului electromagnetic me si vitezei rotorice (in caz de necesitate). Cu ajutorul comutatorului K la intrarea regulatorului de viteza Rωr este transmisa viteza rotorica fie calculata fie cea măsurata .
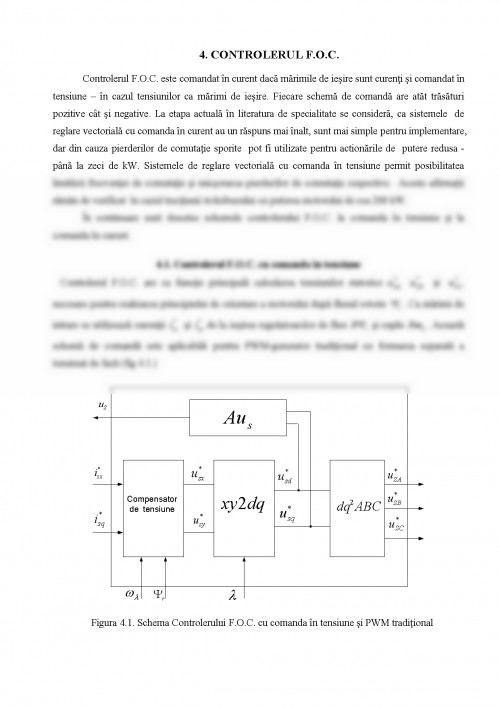
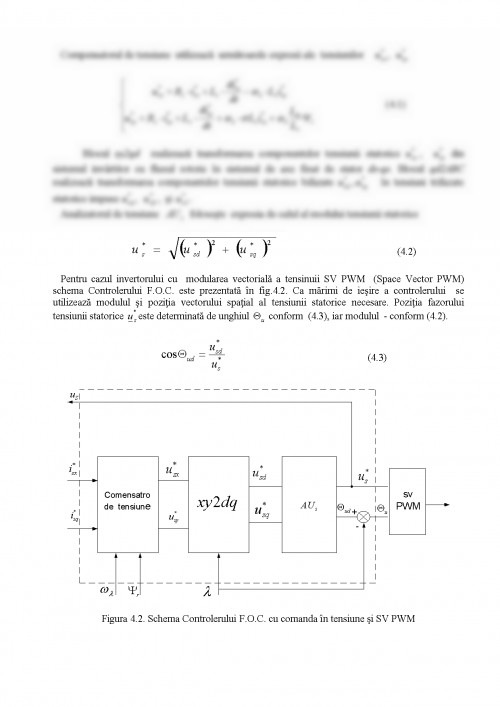
Blocul Controller FOC realizează principiul reglării cu orientare după câmp (Field Oriented Control) in funcţie de fluxul de orientare după fluxul rotoric cu comanda în curent sau în tensiune.
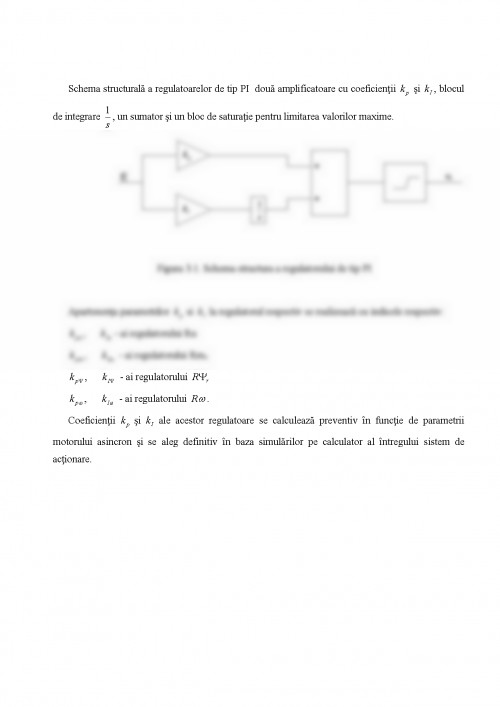
Regulatoarele Rωr, RΨr, Rus, Rme se considera de tip PI cu saturaţie descrise prin ecuaţia diferenţiala
sau după aplicarea transformatei Laplace
sau forma acceptată de comunitatea internaţională
unde - operatorul de diferenţiere, - coeficientul elementului proporţional, iar - al elementului integrator.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.