1. INTRODUCERE
De ce trebuie să studiem modelarea?
Pentru a răspunde la aceasta întrebare avem nevoie de câteva concepte şi definiţii de bază.
Vom porni prin a defini termenul de sistem: Un sistem este caracterizat în fapt prin ce putem vedea
că îi aparţine şi ce nu. De asemenea putem specifica interacţiunea sistemului cu mediul în care se
află. De acum în colo el poate fi observat şi controlat.
* Sunt variabile generate de mediu şi care influenţează comportarea sistemului. Acestea sunt
numite intrări ale sistemului.
* Sunt alte variabile determinate de sistem şi care determină o influenţă asupra mediului.
Acestea se numesc ieşiri ale sistemului.
Aceasta conduce la o posibilă definire a termenului de sistem [1]:
Un sistem este o potenţială sursă de informaţii
Putem defini termenul de experiment:
Un experiment este procesul de extragere a informaţiilor dintr-un sistem în funcţie de
intrările acestuia.
A desfăşura un experiment asupra unui sistem înseamnă a aplica un set de condiţii externe
la intrare şi a observa reacţia sistemului la acestea prin înregistrarea comportării ieşirilor. Marele
dezavantaj al sistemelor reale este faptul că aceste sisteme sunt sub influenţa unor intrări
necontrolabile (numite disturbaţii) şi nu toate informaţiile necesare la ieşire sunt accesibile prin
măsurare. Definiţiile sistemului şi ale experimentului dau posibilitatea definirii termenului de
model:
Un model M al unui sistem S caracterizat printr-un experiment E reprezintă tot ceea ce
experimentul E poate cere sistemului S pentru a-l defini.
În prezentul curs, ne vom concentra asupra subclasei de modele pe care le numim modele
matematice. Acestea reprezintă relaţiile dintre variabilele sistemului în ecuaţii matematice. Prin
efectuarea experimentelor, colectam informaţii despre sistem.
Modelarea reprezintă procesul de organizare a informaţiilor despre un sistem dat.
La început aceste informaţii sunt nestructurate. Pentru a înţelege care sunt cauzele şi care
sunt efectele, vom organiza aceste informaţii. De fapt, vom realiza procesul de modelare. Scopul
principal al modelului folosit implică alegerea formei particulare a acestuia. Cu alte cuvinte, un
model poate fi considerat ca o unealtă specializată, dezvoltată pentru o aplicaţie particulară. Bine
înţeles, aceasta determină folosirea a mai multor modele pentru aplicaţii diferite ale aceluiaşi
sistem. În particular, inginerul foloseşte un model pentru a dezvolta un algoritm de verificare a
lucrului sistemului. Aceste modele, din motive de verificare, trebuie să fie cât mai simple posibil.
Adesea un model care înglobează efecte de prim ordin este inadecvat. O bună realizare presupune
luarea în calcul a efectelor de ordinul doi. Din alt punct de vedere realizarea controlului este adesea
în relaţie directă cu complexitatea modelului. Simularea doreşte să dezvolte modele
MODELAREA SISTEMELOR ELECTROMECANICE partea I Titular: ş.l. ing. Niculai BARBĂ
corespunzătoare datelor experimentale în funcţie de necesităţi. Aceasta cerinţă conduce la
dezvoltarea unor modele mai complexe.
Sunt tipuri diferite de modele matematice [1], [6]. Ne vom concentra studiul asupra
modelelor parametrice care sunt descrise de ecuaţii diferenţiale de forma
Cum realizam procesul de modelare?
1. Vom porni prin descrierea fizică a sistemelor dinamice. Aceasta implică o discuţie asupra
efectelor fizice care trebuie luate în considerare.
2. Calcularea unei singure cantităţi care determină comportarea în timp a sistemului
dinamic. Mai târziu, vom arăta că această cantitate se numeşte Lagrangian extins.
3. Derivarea ecuaţiilor de mişcare. Un program de calcul algebric (MAPLE V) este folosit
pentru a deriva modelul matematic în mod automat.
4. Simularea modelului (MATLAB sau DYNAST) este realizată automat.
5. Simularea.
Sumar
Derivarea ecuaţiilor de mişcare (modelul matematic) poate fi obţinut aplicând principiul
variaţiei energiei. Există o terminologie comună pentru toate tipurile de sisteme, cum ar fi cele
electrice, mecanice, magnetice, etc. prin definirea funcţiilor energiei în termenii coordonatelor
generalizate. Apoi, prin folosirea unui singur principiu fundamental, ex. principiul lui Hamilton,
ecuaţia mişcării este determinata. Variaţia apropiata este aproape de forma analitica şi în urma
calculelor matematice, înţelegerea proceselor fizice interne poate fi pierduta. Cu toate acestea, dacă
metoda este bine înţeleasă, procesul fizic se poate deduce din generalitatea metodei. Exista o
multitudine de funcţii energetice diferite (ex. Lagrangian, energia totala) care pot fi folosite.
În acest curs, modelarea sistemelor mecanice pure este bazată în principal pe Lagrangian
care este o funcţie a coordonatelor generalizate şi a vitezelor asociate. Dacă toate forţele sunt
derivabile la potenţial, atunci comportarea dinamica a sistemului în timp este determinată. Pentru
sistemele mecanice simple, Lagrangianul este definit ca diferenţa dintre energia cinetica şi energia
potenţială.
Exista o similitudine cu sistemele electrice. Ecuaţia de mişcare este unic definită folosind
coenergia electrică şi cantitatea de putere. Curentul de inducţie şi căderea de tensiune pe capacitor
joacă rolul de coordonate generalizate. Toate constrângerile, în principiu cauzate de legile lui
Kirchoff, au fost eliminate.
În consecinţă, avem cantităţile (energia cinetica şi potenţială, forţele generalizate) care
determină partea mecanică şi cantităţile (coenergiile, puterile) pentru a descrie partea electrică.
Aceasta oferă o combinaţie a părţilor mecanica şi electrică ca forme de energie apropiate. Ca
rezultat, vom avea un Lagrangian extins.
MODELAREA SISTEMELOR ELECTROMECANICE partea I Titular: ş.l. ing. Niculai BARBĂ
2. SISTEME MECANICE
2.1. Derivarea ecuaţiilor Lagrange
În cazul sistemelor formate din N particule avem nevoie, în general, de 3N coordonate
pentru a specifica poziţia tuturor particulelor. Daca exista constrângeri, atunci numărul de
coordonate necesar pentru descrierea sistemului este redus. De exemplu, pentru descrierea unui corp
rigid, avem nevoie de sase coordonate, trei pentru punctul de referinţă şi trei pentru orientare. În
general, numărul minim de coordonate n , numit şi grade de libertate, este recomandat pentru a
specifica configuraţia. De obicei, aceste coordonate sunt notate prin i q şi se numesc coordonate
generalizate. Vectorul coordonata
Documentul este oferit gratuit,
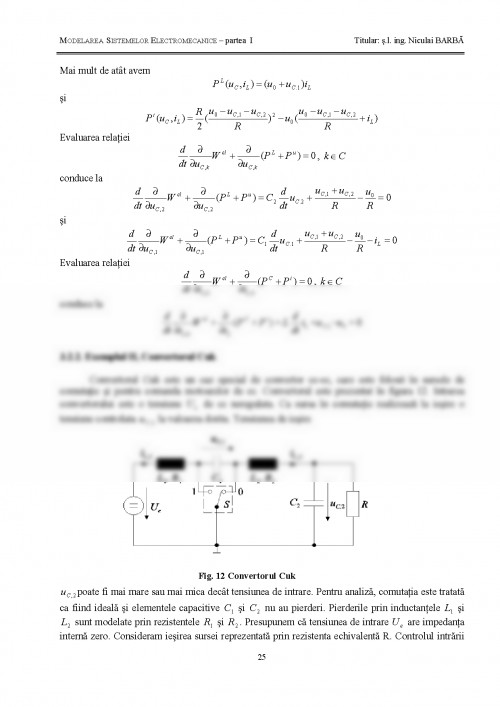
trebuie doar să te autentifici in contul tău.