UTILIZAREA ESTIMĂRII ŞI IDENTIFICĂRII
ÎN COMANDA PROCESELOR
4.1 COMANDA PRIN STRATEGIA ALOCĂRII POLILOR
Un proces liniar staţionar este descris de ecuaţia de stare:
- în cazul continuu:
(4.1)
- în cazul discret:
(4.2)
unde, în ambele cazuri, , şi . Se presupune că tripletul (A, B, C) este concomitent controlabil şi observabil, unde matricele de observabilitate, O(A,C), şi controlabilitate C(A,B) sunt definite de relaţiile:
, (4.3)
având rangul maxim: rangO(A,C)=n şi rangC(A,B)=n.
Comanda presupune a se impune sistemului o dinamică dată, prin plasarea polilor în reacţia de stare, altfel spus de a utiliza un regulator (întâlnit în literatura de specialitate şi sub numele de controler) susceptibil de a introduce un noi moduri în circuitul de reacţie al sistemului [7]. Comanda aleasă este dată de relaţia:
u=Kx+e, (4.4)
în care, K este matricea blocului de reglare (o matrice constantă ai cărei coeficienţi sunt determinaţi) iar e reprezintă vectorul mărimilor de intrare sau mărimilor de prescriere aplicate sistemului. Prin proiectarea matricei K pot fi asigurate anumite performanţe impuse sistemului.
4.1.1 Sisteme cu o singură intrare
4.1.1.1 Descrierea sistemului
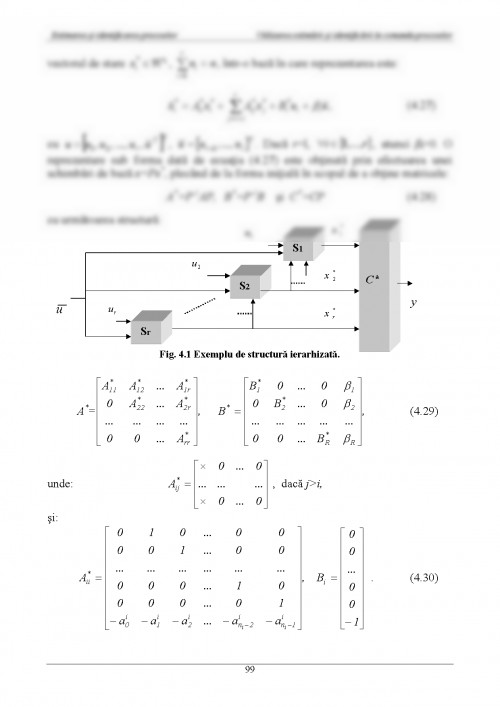
În acest caz comanda u are dimensiunea l=1. Metoda constă în modificarea modelului procesului, prin schimbarea bazei definită de matricea P :
, (4.5)
sub formă canonică:
- în cazul continuu: (4.6)
- în cazul discret: (4.7)
în care,
A*=P-1AP, B*=P-1B, C*=CP, (4.8)
iar A* şi B* sunt:
(4.9)
Sub această formă, apar pe ultima linie a matricei A*, coeficienţii polinomului caracteristic pA(λ) ai matricei A, ale cărui rădăcini sunt valorile proprii (în literatura de specialitate apare şi termenul de modale [5]) ale sistemului iniţial:
pA(λ)= det(λI-A) = a0+ai λ+a2 λ2+…+an-1 λn-1+ λn. (4.10)
De fapt ecuaţiile descriu funcţionarea sistemului în circuit (buclă) închis, ale cărui performanţe vor fi determinate de valorile proprii.
Comanda sistemului este dată de relaţia:
u=KPx*+e, (4.11)
sau sub forma:
u=K*x*+e, (4.12)
expresii în care K şi K*=KP reprezintă vectori liniari.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.