Partea I-a CONDUCEREA PROCESELOR DUPA MARIMEA DE IESIRE
1. Structuri de baza si metode de proiectare
1.1. Structuri de reglare si metode de proiectare
Realizarea unui “produs” de calitate impune "conducerea procesului" in care se elaborează produsul respectiv (în particular proces tehnic, proces tehnologic şi asimiliabile). Un proces poate fi condus în două moduri:
• manual – prin interventia nemijlocită şi adeseori continuă a unui operator uman,
• automat – prin utilizarea unor echipamente dedicate conducerii, denumite echipamente de automatizare (EA).
Ansamblul constructiv-funcţional de echipamente - împreună cu toate "accesoriile" aferente - realizat în vederea conducerii se numeşte dispozitiv de conducere (DC). Conducerea unui proces (tehnic, tehnologic, de laborator ş.a.) presupune efectuarea următoarele tipuri de acţiuni de conducere:
• Acţiuni de comandă (C): elaborarea de comenzi logice – combinaţionale şi secvenţiale – care se întâlnesc in toate acţiunile de conducere dar pot fi şi specifice unor anumite tipuri de procese (a se vedea de exemplu semaforizarea unei intersecţii); studiul teoretic şi aplicativ (de dezvoltare şi implementare) al sistemelor care efectueaza astfel de acţiuni se face cu precădere în cadrul disciplinelor de "sisteme cu evenimente discrete";
• Acţiuni de reglare (R): reglarea (controlul) parametrilor tehnologici (temperatură, presiune, viteză, poziţie, nivel, concentraţie …); – prin astfel de acţiuni se "controlează" evoluţia mărimilor caracteristice - obişnuit cu variaţie continuală în timp - ale unui proces care are un caracter dinamic; această acţiune urmăreşte asigurarea evoluţiei dorite pentru aceste mărimi;
• Acţiuni de supervizare (supraveghere) a funcţionării sigure, de detectare a defecţiunilor şi de monitorizare a desfăşurării procesului (S): – urmărirea şi monitorizarea desfăşurării procesului (sistemului), detectarea defecţiunilor şi înlăturarea acestora prin sistemele de protecţie diagnoză, asigurarea redundanţei conducerii în vederea funcţionării sigure a procesului (a instalaţiilor tehnologice in care se desfăşoară procesul).
A. Conducere în circuit deschis şi conducere în circuit închis (reglare). Activitatea de conducere implică existenţa celor două subsisteme:
- subsistemul condus sau procesul condus (instalaţia tehnologică) abreviat PC,
- subsistemul de conducere, care este denumit dispozitiv de conducere (DC).
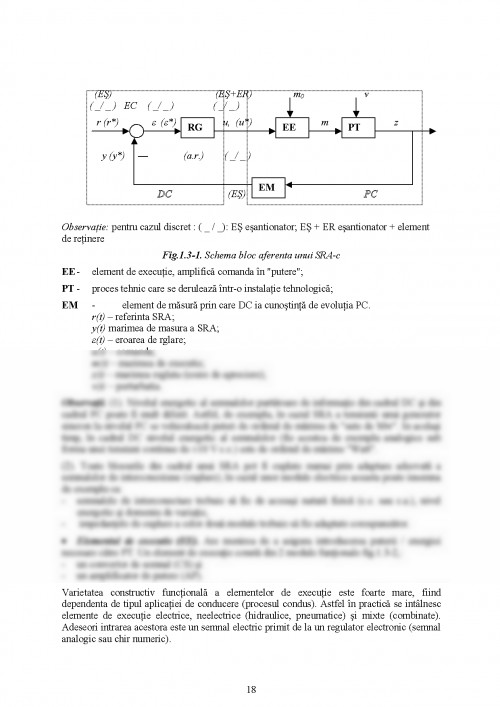
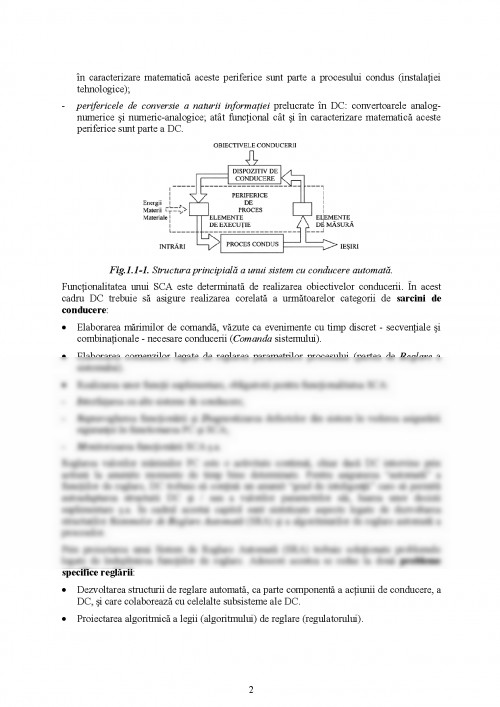
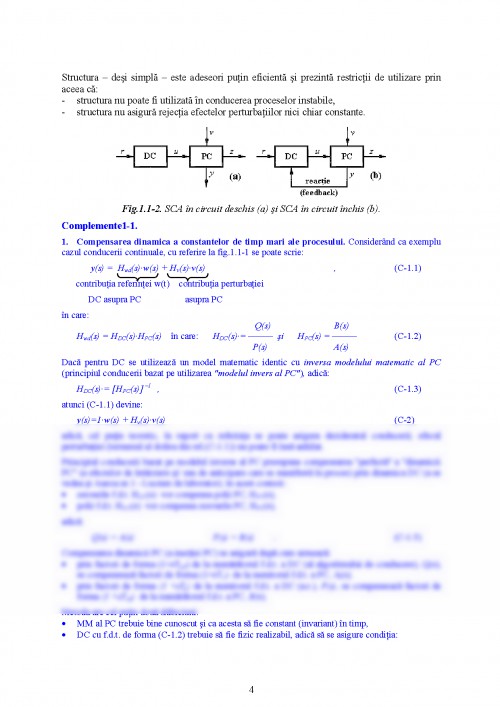
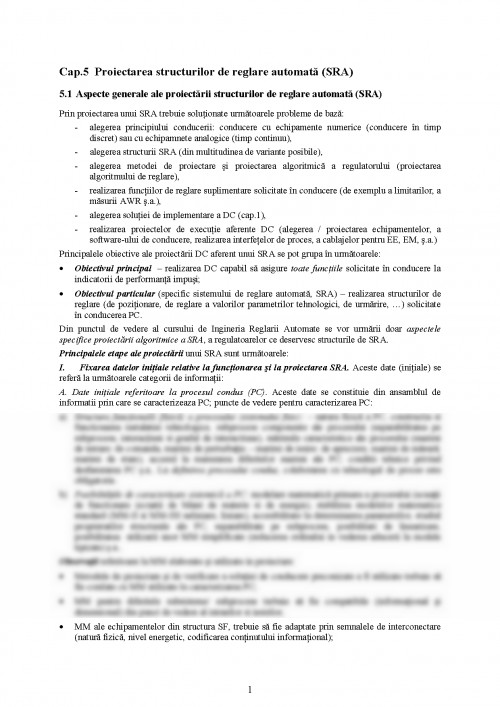
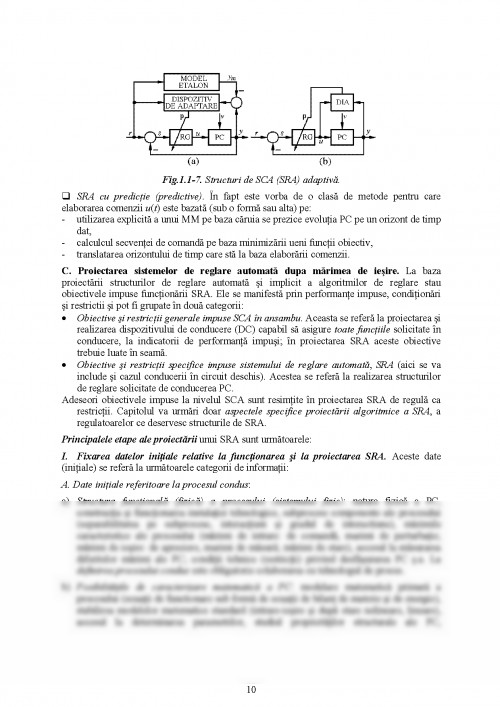
Structura principială a sistemului rezultat prin interconectarea celor două subsisteme, sistemul cu conducere automată (SCA), este prezentată în fig.1.1-1 [23]. Interconectarea se realizează prin intermediul perifericelor de proces. Denumirea se referă la:
- perifericele de interconectare tradiţională DC-PC: echipamentele de intervenţie în proces sau elementele de execuţie (EE) şi echipamentele de măsură (EM); atât funcţional cât şi
în caracterizare matematică aceste periferice sunt parte a procesului condus (instalaţiei tehnologice);
- perifericele de conversie a naturii informaţiei prelucrate în DC: convertoarele analog-numerice şi numeric-analogice; atât funcţional cât şi în caracterizare matematică aceste periferice sunt parte a DC.
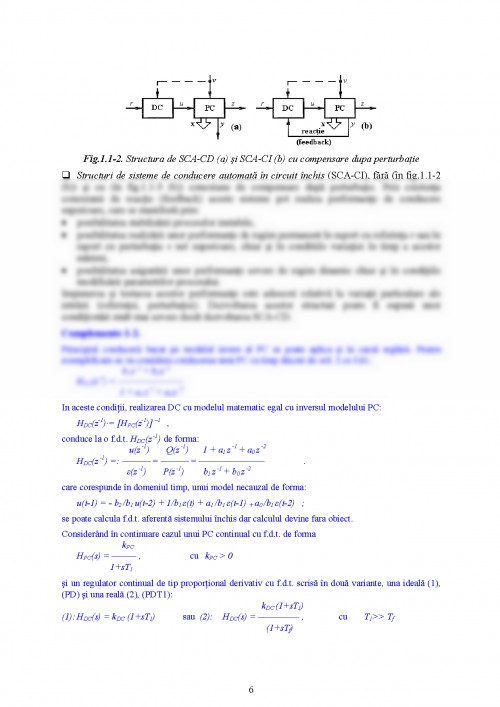
Fig.1.1-1. Structura principială a unui sistem cu conducere automată.
Funcţionalitatea unui SCA este determinată de realizarea obiectivelor conducerii. În acest cadru DC trebuie să asigure realizarea corelată a următoarelor categorii de sarcini de conducere:
• Elaborarea mărimilor de comandă, văzute ca evenimente cu timp discret - secvenţiale şi combinaţionale - necesare conducerii (Comanda sistemului).
• Elaborarea comenzilor legate de reglarea parametrilor procesului (partea de Reglare a sistemului).
• Realizarea unor funcţii suplimentare, obligatorii pentru funcţionalitatea SCA:
- Interfaţarea cu alte sisteme de conducere;
- Supravegherea funcţionării şi Diagnostizarea defectelor din sistem în vederea asigurării siguranţei în functionarea PC şi SCA;
- Monitorizarea funcţionării SCA ş.a.
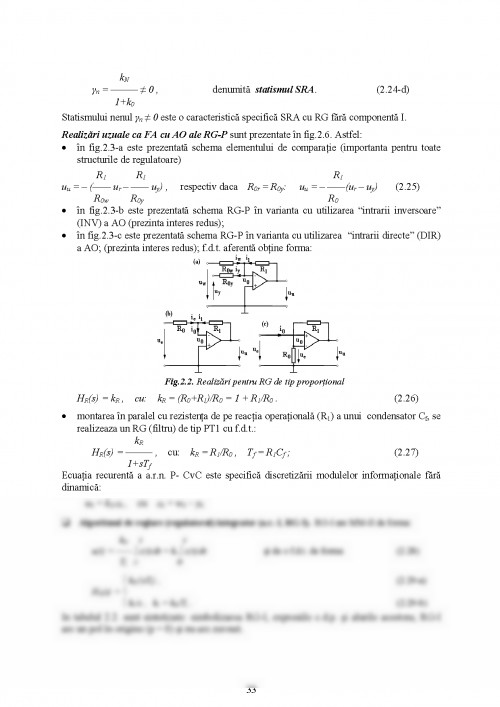
Reglarea valorilor mărimilor PC este o activitate continuă, chiar dacă DC intervine prin actiuni la anumite momente de timp bine determinate. Pentru asigurarea “automată” a funcţiilor de reglare, DC trebuie să conţină un anumit “grad de inteligenţă” care să permită autoadaptarea structurii DC şi / sau a valorilor parametrilor săi, luarea unor decizii suplimentare ş.a. În cadrul acestui capitol sunt sintetizate aspecte legate de dezvoltarea structurilor Sistemelor de Reglare Automată (SRA) şi a algoritmurilor de reglare automată a proceselor.
Prin proiectarea unui Sistem de Reglare Automată (SRA) trebuie soluţionate problemele legate de îndeplinirea funcţiilor de reglare. Adeseori acestea se reduc la două probleme specifice reglării:
• Dezvoltarea structurii de reglare automată, ca parte componentă a acţiunii de conducere, a DC, şi care colaborează cu celelalte subsisteme ale DC.
• Proiectarea algoritmică a legii (algoritmului) de reglare (regulatorului).
Dependent de specificul aplicaţiei, cele două probleme conţin o parte de cercetare-dezvoltare şi o parte de proiectare algoritmică propriu-zisa şi de implementare a soluţiei pe aplicaţie.
Obiectivul principal al dezvoltării unui SRA revine la realizarea unui DC (ca parte a unui DC complex ce asigură toate funcţiile de conducere) capabil să asigure cerinţele impuse desfăşurării procesului. În esenţă prin proiectarea sistemului de reglare automată trebuie rezolvate următoarele probleme:
a) Studiul de oportunitate a conducerii şi analiza de proces.
b) Definirea obiectivelor de reglare ca parte componentă a obiectivelor generale de conducere.
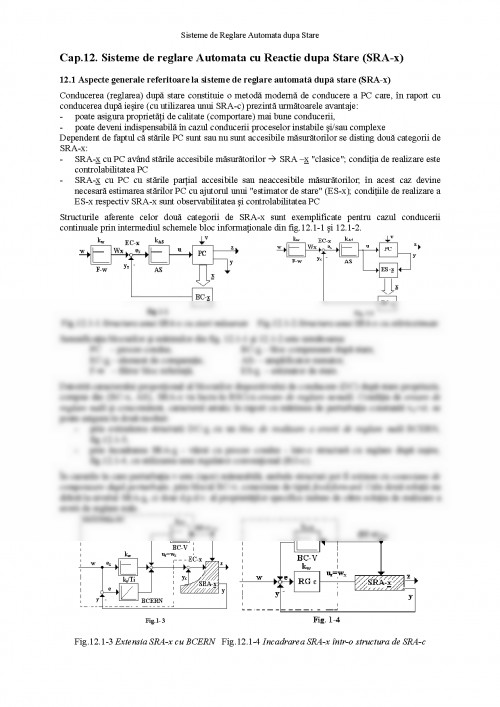
c) Alegerea principiului de reglare (reglare după ieşire, reglare după stare, reglare combinată) şi a structurii SRA (din multitudinea de variante posibile); fixarea soluţiei (tehnologiei) de implementare a soluţiei de conducere (reglare).
d) Alegerea metodei de proiectare adaptate aplicaţiei şi soluţiei de reglare.
e) Proiectarea algoritmică a legii (algoritmului) de reglare (adeseori denumită şi proiectarea regulatorului); validarea structurii de de reglare adoptate.
f) Realizarea unor funcţii suplimentare solicitate în reglarea (conducerea) PC (de exemplu, a limitărilor, a măsurii AWR ş.a.); validarea structurii extinse de reglare.
g) Alegerea sau – după caz – proiectarea echipamentelor de conducere şi a software-ului prin care se implementează funcţiile de reglare, elaborarea “proiectelor tehnice” pe baza cărora se pot implementa soluţiile de conducere (în particular, de reglare) adoptate.
h) Coordonarea functionalităţii SRA cu funcţionalitatea echipamentelor (programelor) care realizează celelalte sarcini de conducere (la nivelul SCA).
i) Realizarea proiectelor de execuţie aferente DC (alegerea / proiectarea echipamentelor, a software-ului de conducere, realizarea interfeţelor de proces, a cablajelor pentru EE, EM ş.a.).
Curs SACAP predat in Politehnica Timisoara
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.