Curs 1
Introducere
Abordarea structurală a sistemelor de proiectare pentru procese complexe cum sunt comanda numerică cu calculatorul (CNC) a maşinilor unelte şi a echipamentelor de comandă a roboţilor industriali conduce la configuraţii de tip multiprocesor. Acestea permit automatizări flexibile locale spre exemplu în sisteme flexibile de fabricaţie. Sistemul multiprocesor (SMP) reprezintă soluţii ale unor probleme complexe de automatizări în timp real acolo unde e necesar un timp de răspuns rapid (perioadă de şantionare ns sau μs), şi un mare necesar de calcul.
În SMP o funcţie de bază este comunicarea între μsistemele componente realizată prin mesaje precum şi sincronizarea execuţiei programului de aplicaţie. Conceptele fundamentale referitoare la arhitectura şi modul de proiectare al SMP sunt descrise de două str de bază:
• Structuri multiprocesor cu module funcţionale distribuite
• Structuri multiprocesor cu module funcţionale concentrate
Arhitecturi de SMP în variantă distribuită
Principii structurale (topologice)
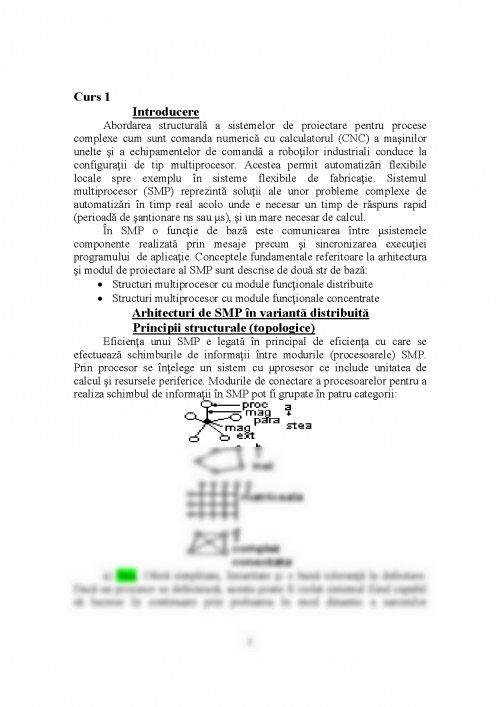
Eficienţa unui SMP e legată în principal de eficienţa cu care se efectuează schimburile de informaţii între modurile (procesoarele) SMP. Prin procesor se înţelege un sistem cu μprosesor ce include unitatea de calcul şi resursele periferice. Modurile de conectare a procesoarelor pentru a realiza schimbul de informaţii în SMP pot fi grupate în patru categorii:
a) Stea. Oferă simplitate, liniaritate şi o bună toleranţă la defectare. Dacă un procesor se defectează, acesta poate fi izolat sistemul fiind capabil să lucreze în continuare prin preluarea în mod dinamic a sarcinilor procesorului defect. Această arhitectură este utilizată intensiv în conducerea proceselor industriale datorită avantajelor mai sus menţionate.
b) Inel. Se caracterizează prin posibilitatea comunicării directe numai cu 2 vecini. Comunicaţia cu un procesor mai îndepărtat se face prin intermediul procesoarelor de pe calea care asigură legătura între aceste două procesoare.
Avantaj: dpdv hardware, structura interfeţelor cu cei doi vecini este identică indiferent de numărul procesoarelor din SMP.
Dezavantaj: la defectarea unui procesor sau a unei magistrale banda de comunicaţii este întreruptă ea putând fi realizată pe o altă cale mai lungă.
c) Matriceală. Prezintă simplitate faţă de soluţia b). (interfaţa cu MAGE este simplă: o singură legătură).
Dezavantaj: comutatorul (partea logică) care dirijează cuplarea mag în nodurile reţelei este complexă dpdv hard şi la defectarea lui SMP nu mai funcţionează.
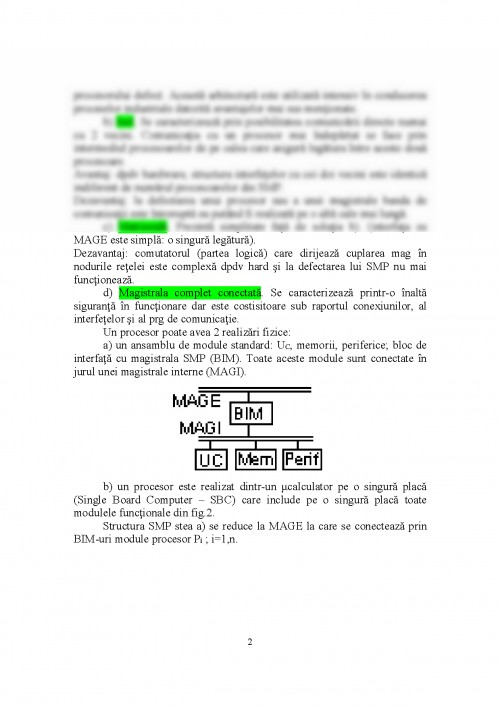
d) Magistrala complet conectată. Se caracterizează printr-o înaltă siguranţă în funcţionare dar este costisitoare sub raportul conexiunilor, al interfeţelor şi al prg de comunicaţie.
Un procesor poate avea 2 realizări fizice:
a) un ansamblu de module standard: UC, memorii, periferice; bloc de interfaţă cu magistrala SMP (BIM). Toate aceste module sunt conectate în jurul unei magistrale interne (MAGI).
b) un procesor este realizat dintr-un μcalculator pe o singură placă (Single Board Computer – SBC) care include pe o singură placă toate modulele funcţionale din fig.2.
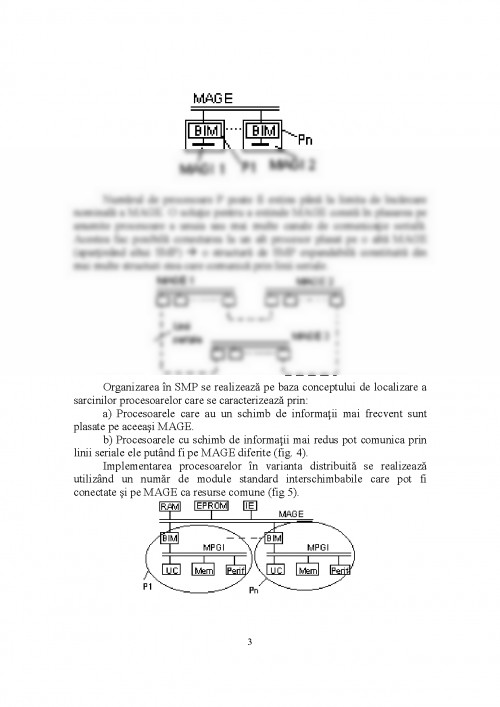
Structura SMP stea a) se reduce la MAGE la care se conectează prin BIM-uri module procesor Pi ; i=1,n.
Numărul de procesoare P poate fi extins până la limita de încărcare nominală a MAGE. O soluţie pentru a extinde MAGE constă în plasarea pe anumite procesoare a unuia sau mai multe canale de comunicaţie serială. Acestea fac posibilă conectarea la un alt procesor plasat pe o altă MAGE (aparţinând altui SMP) o structură de SMP expandabilă constituită din mai multe structuri stea care comunică prin linii seriale.
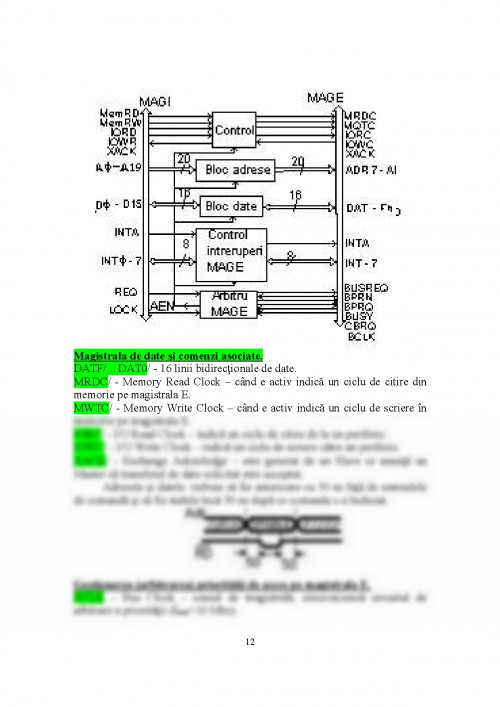
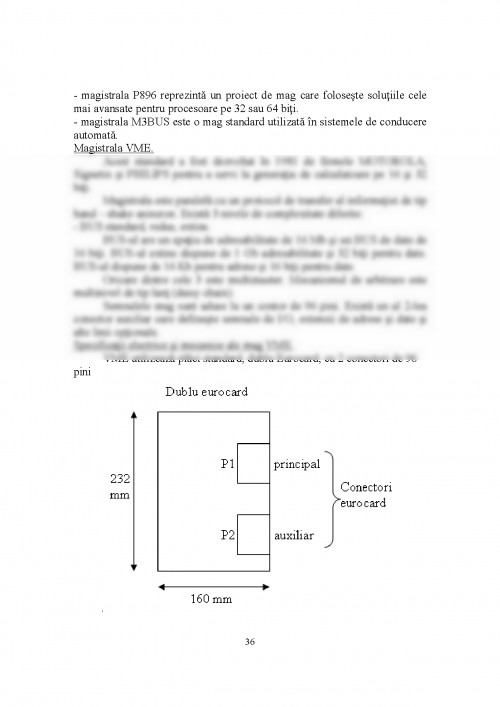
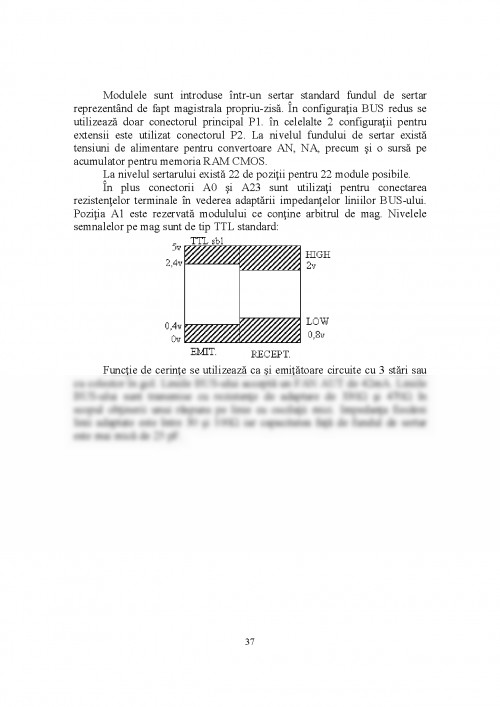
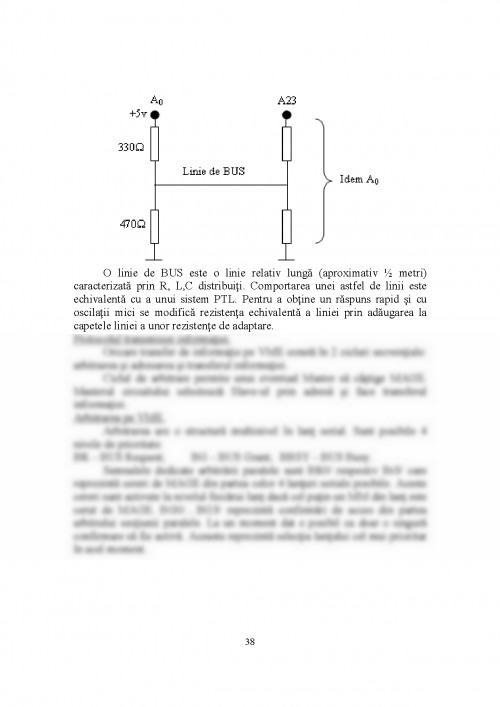
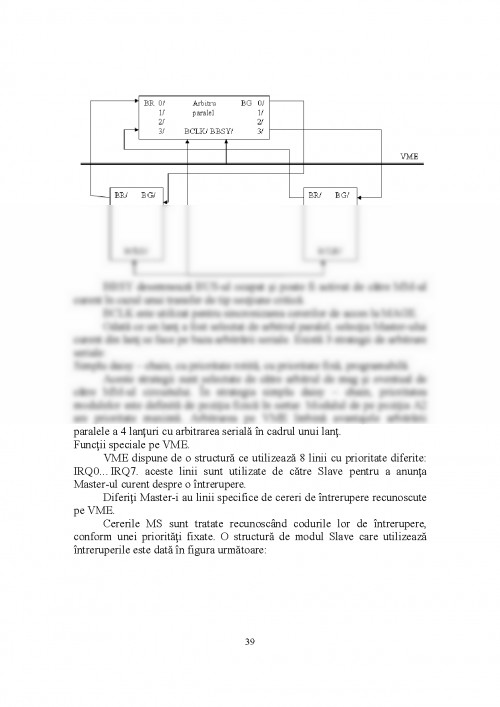
Tipuri de sisteme multiprocesor. Arhitecturi si conexiuni. Magistrale si module.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.