
INTRODUCERE
Sistemele cu microprocesoare vor fi abordate ín acest curs, ín principal, din punctul de
vedere al inginerului automatist; astfel, sistemele cu microprocesoare stau la baza sistemelor
moderne de conducere.
Conducerea - este un proces de culegere, transmitere ßi prelucrare a informaþiilor referitoare
la starea ßi evoluþia obiectului condus, de elaborare a acþiunilor necesare realizárii unui scop
determinat - obiectivul conducerii - ßi de traducere ín fapt a acþiunilor elaborate, cu urmárirea
sistematicá a realizárii acestor acþiuni.
METODOLOGII DE CONDUCERE
Funcþiile ßi configuraþia sistemelor de conducere au evoluat în decursul timpului, fiind
rezultatul progresului tehnico-ßtiinþific continuu.
A. Conducerea cu mijloace tradiþionale
1.Conducerea directá de cátre om (conducerea manualá)
Proces
Aparate de
másurá +
vizualizare
E.E.
p1 ..... pn
comandá
x
operator
uman
program
y
márimea
reglatá
Perturbaþii
márimea de
Pe baza informaþiilor primite de la aparatele de másurá ßi vizualizare cu privire la variabilele
caracteristice ale procesului condus, operatorul acþioneazá asupra procesului prin intermediul
elementelor de execuþie (E.E.), pe baza unui program ßi a experienþei, pentru menþinerea
variabilelor de bazá ale procesului între limitele dorite.
Dezavantaje:
- imposibilitatea operatorului uman de a manipula simultan mai multe comenzi;
- viteza scázutá de reacþie;
- lipsa de rezistenþá fizicá ßi psihicá, emotivitatea, etc.
2. Conducerea cu ajutorul regulatoarelor (automatizare convenþionalá)
Regulatorul preia funcþiile operatorului uman. Aceste sisteme de reglare cunosc o largá
ráspändire în prezent. Reglarea se face dupá eroare (abatere) - principiul acþiunii prin discordanþá,
dupá perturbaþie - principiul compensaþiei - sau combinat. In practica reglárii automate s-au impus o
serie de legi de reglare tipizate de tip PID (proporþional-integrator-derivativ).
Dezavantaje:
- reglarea multivariabilá este practic imposibilá utilizänd tehnologia "clasicá" (cu exceptia
canalelor decuplate), deßi teoria sistemelor multivariabile este foarte bine conturatá;
- legile de reglare implementate cu ajutorul regulatoarelor analogice sunt simple (de tip PID),
neputänd fi implementaþi algoritmi evoluaþi de conducere;
- inflexibilitatea - modificarea strategiei de reglare impune modificári corespunzátoare ale
aparaturii;
- multitudinea de regulatoare dintr-un proces nu au capacitatea de a interacþiona ín ansamblu,
cu excepþia celor conectate în cascadá.
Regulatorul a eliberat operatorul de necesitatea de a urmári variaþia variabilei reglate ßi de a
asista comanda datá procesului. Cu toate acestea, numárul de variabile ce trebuie urmárite rámäne
foarte mare. Dinamica referinþelor este evident mai lentá, dar operatorul trebuie sá asigure
supravegherea aparatelor de másurá care ajutá ín luarea de decizii privind fixarea referinþelor.
Din cele de mai sus rezultá cá anumite situaþii din practica inginereascá impun îmbunátáþirea
metodelor de conducere a proceselor.
B. Conducerea cu ajutorul calculatoarelor de proces
Utilizarea calculatoarelor în scopul conducerii proceselor tehnologice a fost determinatá, pe de
o parte, de creßterea complexitáþii proceselor, iar pe de altá parte, de progresele remarcabile obþinute
în conceperea ßi realizarea de mijloace de prelucrare a informaþiilor.
Primele aplicaþii utilizänd calculatoare au fost de tipul "conducere off-line". In regim "off-line"
operatorul citeßte datele din proces, le transpune în formá ßi pe suporþi adecvaþi calculatorului, iar
rezultatele prelucrárii servesc drept ghid pentru operator. In acest regim orice legáturá între proces ßi
calculator este exclusá. In prezent conducerea "off-line" nu mai este utilizatá.
Dezavantajele calculatorului universal:
- necesitá condiþii pretenþioase de funcþionare (mediu climatizat, etc);
- incompatibilitate între tipul ßi forma datelor pe care le acceptá ßi cele oferite de proces.
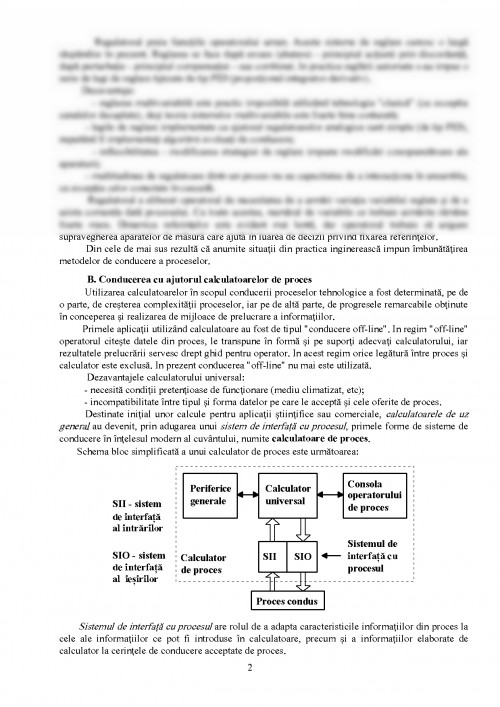
Destinate iniþial unor calcule pentru aplicaþii ßtiinþifice sau comerciale, calculatoarele de uz
general au devenit, prin adugarea unui sistem de interfaþá cu procesul , primele forme de sisteme de
conducere în înþelesul modern al cuväntului, numite calculatoare de proces.
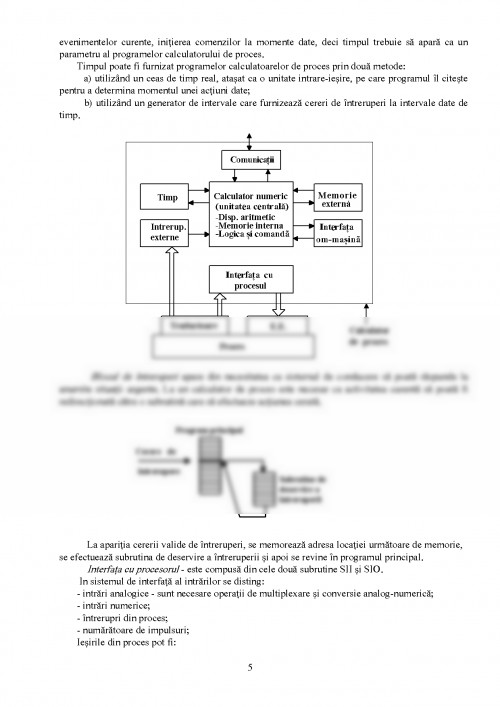
Schema bloc simplificatá a unui calculator de proces este urmátoarea:
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.