

Sisteme automate liniare multivariabile
5.1. Procese tehnologice cu mai multe mărimi de ieşire şi intrare
În practică, majoritatea proceselor tehnologice sunt caracterizate de mai multe mărimi de intrare şi ieşire impunându-se reglarea mai multor mărimi de ieşire.
Corespunzător numărului de mărimi de ieşire din proces supuse reglării, se impune şi utilizarea unui număr adecvat de elemente de execuţie şi de traductoare
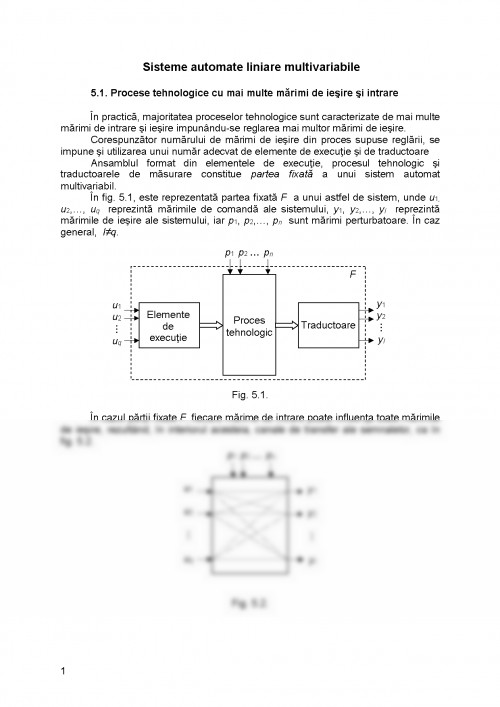
Ansamblul format din elementele de execuţie, procesul tehnologic şi traductoarele de măsurare constitue partea fixată a unui sistem automat multivariabil.
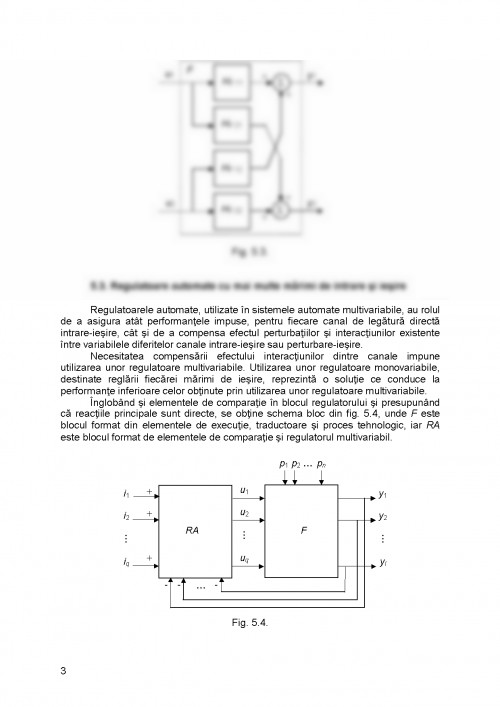
În fig. 5.1, este reprezentată partea fixată F a unui astfel de sistem, unde u1, u2,…, uq reprezintă mărimile de comandă ale sistemului, y1, y2,…, yl reprezintă mărimile de ieşire ale sistemului, iar p1, p2,…, pn sunt mărimi perturbatoare. În caz general, l≠q.
Fig. 5.1.
În cazul părţii fixate F, fiecare mărime de intrare poate influenţa toate mărimile de ieşire, rezultând, în interiorul acesteia, canale de transfer ale semnalelor, ca în fig. 5.2.
Fig. 5.2.
Cum partea fixată F este liniară, pentru fiecare canal de transfer se poate defini o funcţie de transfer:
(5.1)
Partea fixată F fiind liniară, mărimile de ieşire se calculează funcţie de cu l linii şi q coloane
(5.2)
Acest sistem poate fi exprimat sub formă matriceal-vectorială astfel:
(5.3)
respectiv:
Y(s) = HF(s) U(s) (5.4)
unde:
HF(s) - matricea de transfer a părţii fixate multivariabile, cu l linii şi q coloane;
Y(s) - vectorul coloană al transformatelor Laplace directe ale mărimilor de ieşire, cu l componente;
U(s) - vectorul coloană al transformatelor Laplace directe ale mărimilor de comandă, cu q componente.
5.2. Parte fixată cu două mărimi intrare şi două mărimi de ieşire
Se consideră partea fixată a unui astfel de sistem cu două mărimi intrare şi două mărimi de ieşire, adică l=q=2.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.