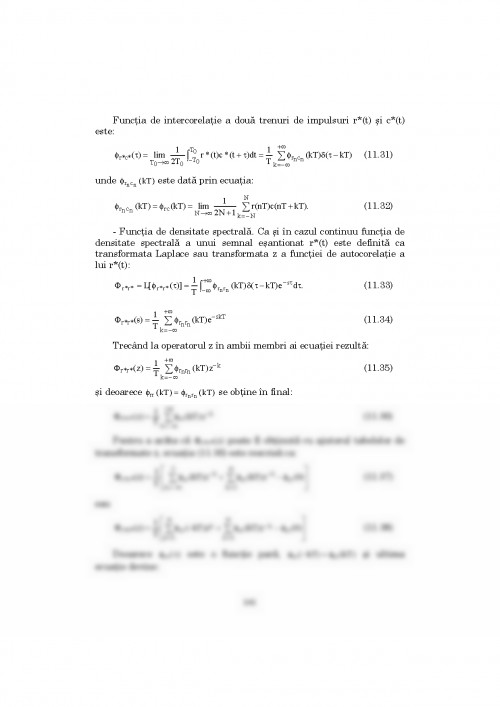

Sistemele cu informaţii discrete includ în componenţa lor subansambluri de prelucrare numerică a datelor, respectiv calculatoare numerice (CN).
Până în anii '60-‘70 erau utilizate calculatoarele analogice pentru simularea sistemelor de control automat. Tehnologia analogică utilizată în mecanică, pneumatică şi electronică a fost utilizată şi în controlul automat. Dezvoltarea rapidă a microelectronicii şi calculatoarelor a condus la dezvoltarea actuală a automaticii. Iniţial. calculatoarele au fost utilizate ca subansambluri în sisteme de control complicate. În prezent, datorită costului scăzut al microprocesoarelor, calculatoarele numerice sunt utilizate în regulatoare pentru bucle individuale de reglare. În numeroase domenii, calculatoarele asigură performanţe superioare faţă de regulatoarele analogice şi sunt mai ieftine. Calculatoarele numerice se află încă într-o fază de dezvoltare rapidă datorită progresului circuitelor VSLI (Very Large Scale Integration).
Din cauza acestor mutaţii, analiza, proiectarea şi implementarea sistemelor de control automat s-a modificat drastic. La început, a fost numai problema de a transla metodele de proiectare din continuu pentru sistemele discrete. În curând s-a observat că se obţine un câştig mult mai mare exploatând întregul potenţial al acestor noi metodologii.
În urmă cu 25 de ani era nerealist a se încerca implementarea unui tip de regulator rezultat din această nouă teorie, cu excepţia unor aplicaţii în domeniul aerospaţial sau al sistemelor de control avansate.
În prezent este posibilă analiza şi proiectarea sistemelor discrete la un preţ rezonabil, folosind pachete de programe de proiectare asistate de calculator ce sunt din ce în ce mai răspândite.
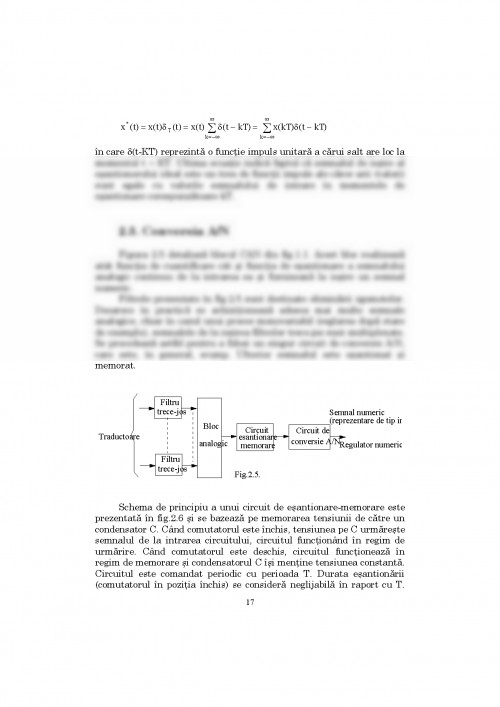
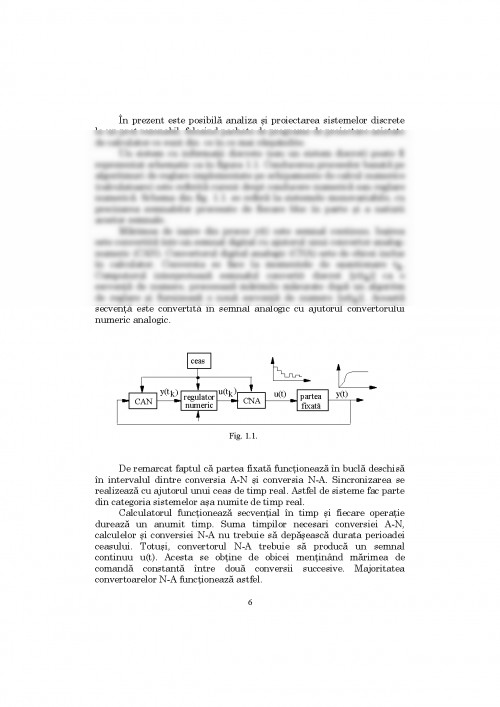
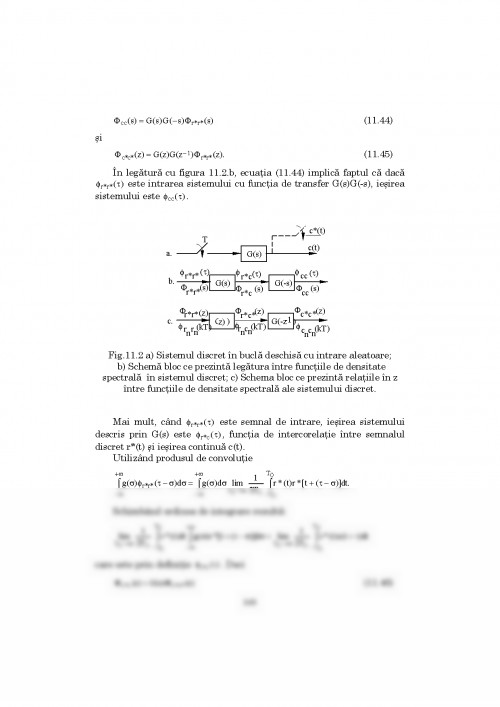
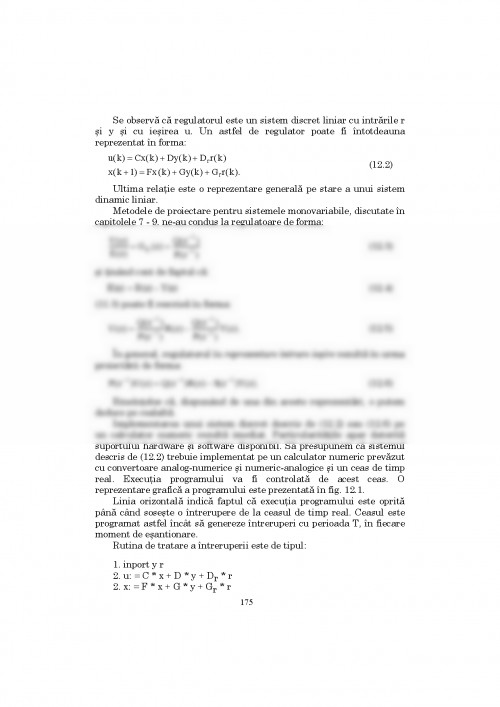
Un sistem cu informaţii discrete (sau un sistem discret) poate fi reprezentat schematic ca în figura 1.1. Conducerea proceselor bazată pe algoritmuri de reglare implementate pe echipamente de calcul numerice (calculatoare) este referită curent drept conducere numerică sau reglare numerică. Schema din fig. 1.1. se referă la sistemele monovariabile, cu precizarea semnalelor procesate de fiecare bloc în parte şi a naturii acestor semnale.
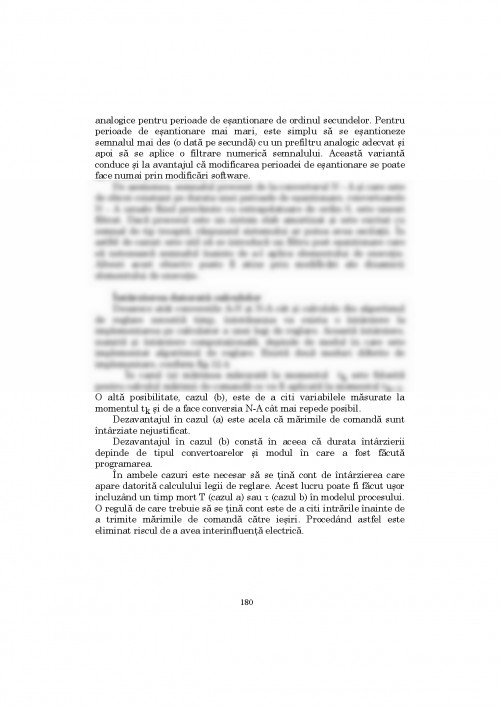
Mărimea de ieşire din proces y(t) este semnal continuu. Ieşirea este convertită într-un semnal digital cu ajutorul unui convertor analog-numeric (CAN). Convertorul digital analogic (CNA) este de obicei inclus în calculator. Conversia se face la momentele de eşantionare tk. Computerul interpretează semnalul convertit discret {y(tk)} ca o secvenţă de numere, procesează mărimile măsurate după un algoritm de reglare şi furnizează o nouă secvenţă de numere {u(tk)}. Această secvenţă este convertită în semnal analogic cu ajutorul convertorului numeric analogic.
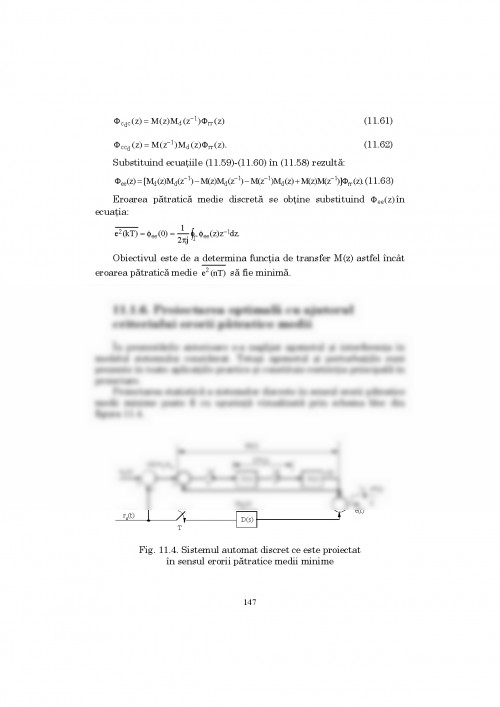
ceasCANregulatornumericCNAparteafixatãy(tk)u(tk)u(t)y(t)Fig. 1Fig. 1.1.
De remarcat faptul că partea fixată funcţionează în buclă deschisă în intervalul dintre conversia A-N şi conversia N-A. Sincronizarea se realizează cu ajutorul unui ceas de timp real. Astfel de sisteme fac parte din categoria sistemelor aşa numite de timp real.
Calculatorul funcţionează secvenţial în timp şi fiecare operaţie durează un anumit timp. Suma timpilor necesari conversiei A-N, calculelor şi conversiei N-A nu trebuie să depăşească durata perioadei ceasului. Totuşi, convertorul N-A trebuie să producă un semnal continuu u(t). Acesta se obţine de obicei menţinând mărimea de comandă constantă între două conversii succesive. Majoritatea convertoarelor N-A funcţionează astfel.
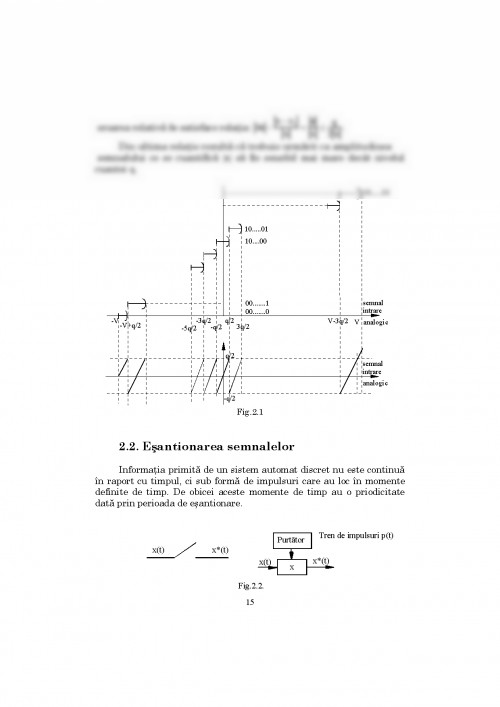
1.1. Tipuri de semnale
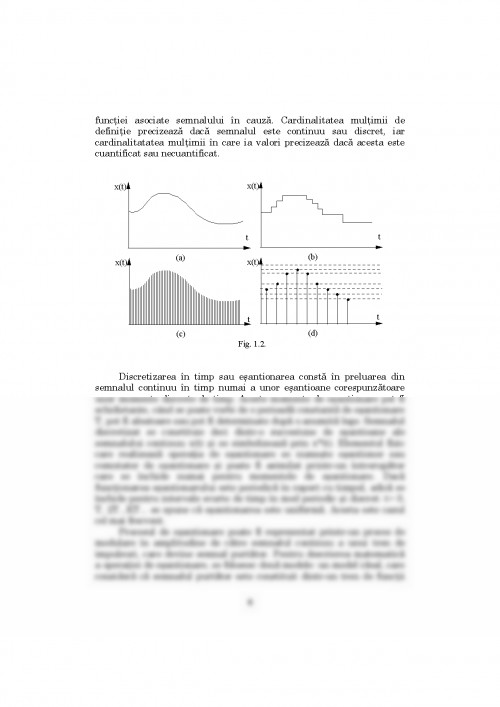
Un semnal continuu în timp, sau, pe scurt, semnal continuu este definit pe un domeniu continuu de timp. Un astfel de semnal poate lua fie valori continue, fie un număr de valori distincte. Un semnal continuu care ia valori continue se numeşte semnal continuu analogic. Un semnal continuu care poate lua numai un număr finit de valori distincte se numeşte semnal continuu cuantificat.
Procedeul prin care dintr-un semnal analogic se obţine un semnal cuantificat se numeşte cuantificare, iar valorile în număr finit, rezultate în urma cuantificării, se numesc valori cuantificate. Figura 1.2 pune în evidenţă diferenţele dintre semnalul analogic continuu (a) şi semnalul analogic cuantificat (b). Uzual, ca limbaj, referirea unui semnal drept semnal continuu, presupune faptul că semnalul respectiv este analogic, prin sintagma "semnal continuu", neînsoţită de nici o altă precizare, înţelegându-se un semnal continuu analogic. Din punct de vedere matematic, semnalele continue (analogice sau cuantificate) sunt funcţii de variabilă reală cu valori fie într-o submulţime din R (semnal analogic), fie într-o mulţime cu număr finit de elemente (semnal cuantificat).
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.