
Manipulatorul este sistemul mecanic automat a carui comanda se bazeaza pe sisteme rigide care presupun o interventie in structura fizica a sistemului de programare pentru modificarea ciclului de functionare.
Robotul industrial presupune un sistem flexibil de comanda la care programul se poate modifica fara interventie asupra structurii sale fizice.
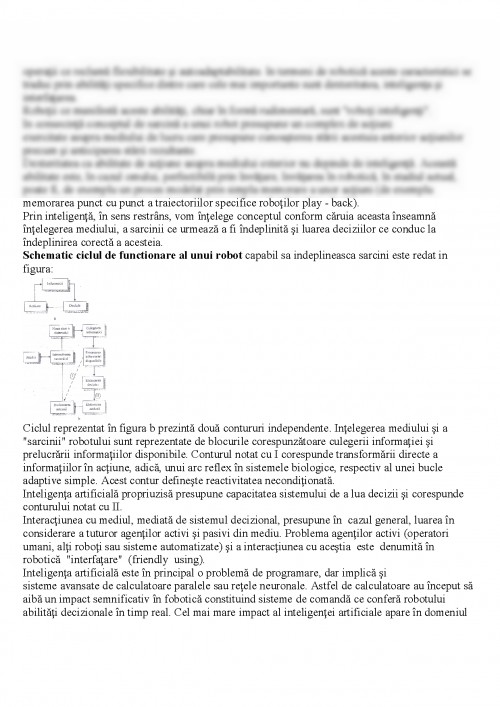
Sistemele robotului
Operatorul uman are funcţia de control supraveghere şi decizie globală având posibilitatea de a introduce informaţia necesară funcţionării robotului având în permanenţă posibilitatea modificării acesteia.
Sistemul de comandă si control preia informaţia introdusă de operatorul uman, asigură prelucrarea informaţiilor furnizate de către sistemele senzoriale extra şi interaceptoare precum şi dialogul cu operatorul uman. Informaţiile rezultate sunt transmise sub formă de semnal de comandă către sistemul energetic.
Sistemul energetic reprezintă sursa de energie şi asigură fluxurile energetice necesare funcţionării celorlalte sisteme ale robotului. Natura acestor sisteme poate fi mecanică, electrică, hidraulică, pneumatică sau combinaţii ale acestora. Fluxurile energetice sunt dirijate spre sistemele mecanice ce au rolul de a asigura locomoţia in cazul roboţilor mobili respectiv manipularea obiectelor în cazul roboţilor staţionari. In :azul roboţilor mobili ce au pe lângă funcţia de locomoţie şi funcţii de manipulare sistemul energetic dirijează fluxuri energetice de aceiaşi natură sau de natură diferită ?pre cele două sisteme mecanice de acţionare.
Sistemul mecanic este un sistem complex alcătuit din sisteme ce asigură manipularea şi/sau locomoţia respectiv prehensarea şi/sau contactul cu suprafaţa de sprijin.
Sistemul mecanic de locomoţie specific roboţilor mobili, asigură poziţionarea şi orientarea corpului robotului în raport cu suprafaţa de susţinere în vederea deplasării ntregului ansamblu. Sistemele de contact pot fi: roţi, şenile, talpa pedipulatorului sau
-ombinaţiile acestora.
Sistemul mecanic de manipulare asigură poziţionarea şi orientarea efectorului enninal în raport cu un sistem de referinţă considerat fix.
Efectorul terminal poate fi: prehensor sau o unealtă specializată (dispozitiv).
Senzori interoceptori aparţin sistemului de măsură şi control cu rolul de a stabili ' irea internă de funcţionare a robotului descrisă de parametrii cinematici şi dinamici ai mişcării. Aceşti senzori sunt de fapt traductori de deplasare, forţă, presiui:-temperatură,etc.
Senzori exteroceptori sunt sisteme senzoriale complexe destinate sesiză; mediului exterior. Sunt specifici roboţilor avansaţi şi inteligenţi capabili : interacţioneze cu mediul ambiant pentru îndeplinirea optimă a sarcinii. Aceşti senzori sunt de tip vizual, tactil, sonor, de proximitate, chemoreceptor, de radiaţie.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.