I. GENERALITĂTI ALE ROBOTILOR INDUSTRIALI
1.1. Introducere în problematica robotilor industriali. Definitii
Notiunea de “robot” a fost introdusă pentru prima dată de scriitorul ceh Karel Capek
într-o piesă de anticipatie stiintifică “R.U.R.” (Rossum’s Universal Robot), scrisă în anul
1922, pentru a denumi fiintele umanoide – personajele principale ale comediei. Constituind
vreme îndelungată tema unei ample literaturi stiintifico-fantastice, robotii au fost realizati
ca sisteme tehnice relativ recent, determinând aparitia unei noi orientări tehnico-stiintifice
si anume tehnica robotilor. Domeniile de aplicare a tehnicii robotilor se lărgesc mereu, ei
putând fi utilizati în industrie, transporturi si agricultură, în cercetarea stiintifică, în
cunoasterea oceanului si a spatiului cosmic etc.
În general, robotii constituie o clasă de sisteme tehnice care imită sau substituie
functii motrice sau intelectuale umane. Aceasta se realizează prin asocierea diferitelor tipuri
de sisteme de manipulare sau locomotoare, determinând caracterul antropomorfic al
robotului, cu diferite tipuri de echipamente de calcul sau logice, care determină functiile
intelectuale ale acestuia. Robotii îsi desfăsoară activitatea într-un mediu concret, ale cărui
caracteristici pot rămâne constante sau sunt variabile în timp. Din punct de vedere al relatiei
om-robot în timpul desfăsurării lucrului robotilor, acestia se împart în trei mari categorii:
· Roboti automati;
· Roboti biotehnici;
· Roboti interactivi.
Robotii automati realizează functiile lor fără participarea directă a omului în
procesul de comandă. Având în vedere adaptabilitatea lor la conditiile (starea) mediului în
care îsi realizează functiile, robotii automati se împart în trei generatii:
1. Robotii din generatia I, care se caracterizează prin program fix de functionare, ei fiind
capabili să repete în mod strict operatiile specificate în program, sub conditia
invariabilitătii mediului în care se lucrează, fără perturbatii externe. Ei nu se adaptează la
schimbările mediului, neavând, practic, nici o informatie despre mediul extern. Programul
acestor roboti se poate schimba într-o oarecare măsură si sunt utilizati cel mai bine la
aplicatii industriale pentru operatii ce se repetă stereotip.
2. Generatia a II-a cuprinde roboti adaptivi, capabili să lucreze în conditii de mediu
variabile sau partial necunoscute initial. Capacitatea de adaptare a robotului la actiunea
perturbatiilor date de schimbările de mediu este determinată de senzorii cu care se dotează
acesti roboti, de la care se obtin informatii asupra schimbărilor conditiilor externe. Acesti
roboti lucrează după un ciclu de operatii definite în prealabil, dar pot să efectueze si operatii
sub schimbarea conditiilor de operare.
3. Generatia a III-a cuprinde roboti inteligenti, posedând oarecare caractere de
inteligentă artificială, gradul lor de inteligentă variind în raport cu functiile care au fost
dorite initial. Acesti roboti sunt capabili să-si definească actiunile instantanee luând în
considerare informatiile obtinute prin senzori tactili, vizuali sau de zgomot asupra mediului
de operare, să rezolve probleme particulare si să-si modifice modul de actiune în
concordantă cu variatiile mediului de operare.
6
Robotii biotehnici sunt roboti la care există o permanentă participare a operatorului
uman în procesul de comandă. Sunt împărtiti în trei subgrupe:
- roboti comandati pas cu pas;
- roboti copiativi, denumiti si master-slave robots;
- roboti semiautomati.
În cazul robotilor comandati pas cu pas, prin actionarea de către operatorul uman a
unui buton sau manetă, este pus în functiune unul din gradele de miscare ale robotului.
Robotii master-slave sunt constituiti din două lanturi cinematice deschise, primul lant
(master) având miscarea comandată de operatorul uman, iar al doilea (slave) copiind la
scară această miscare si efectuând operatiile de manipulare pentru care este destinat
robotul. În alte cazuri, legătura dintre master si slave este indirectă, prin teletransmisie. În
ambele cazuri, operatorul uman trebuie să vadă tot timpul miscarea elementului manipulat
de slave, aceasta printr-o fereastră sau pe un ecran display.
În cazul robotilor biotehnici semiautomati, operatorul uman participă nemijlocit la
procesul de comandă, dar în acelasi timp cu el lucrează si un calculator universal sau
specializat. Semnalul de comandă la aceste sisteme este dat de operatorul uman, obisnuit
printr-o manetă de comandă ce poate avea 3-6 grade de miscare. Semnalul obtinut prin
apăsarea manetei după un grad de miscare oarecare este preluat de calculator, care
efectuează calcule si formează semnalele de comandă pentru fiecare grad de miscare al
organului de executie al robotului.
Robotii interactivi se caracterizează prin faptul că operatorul uman are numai o
participare periodică în procesul de comandă, în restul timpului robotul fiind comandat
automat de calculatorul electronic. Acesti roboti pot functiona în regim automatizat, cu
alternarea permanentă a regimului biotehnic cu cel automat, cu comandă de supervizare sau
cu comandă de dialog. Prin utilizarea acestor roboti se ating două scopuri. Pe de o parte,
efectuându-se automat toate operatiile robotului, se obtine productivitatea maximă a
lucrului acestuia. Pe de altă parte, înfăptuind comanda la distantă a robotului de către om,
se obtine posibilitatea efectuării unor operatii complexe în locuri în care omul nu poate
actiona nemijlocit. Ca urmare, acesti roboti sunt utilizati în cercetarea spatiului cosmic, a
oceanului, în cazul unor operatii complexe din mediul industrial, în exploatarea minelor cu
instalatii de teleoperare. Robotii ce actionează în medii industriale au căpătat denumirea de
roboti industriali. În general, acestia sunt roboti automati si în cazuri mai rare se utilizează
în industrie si roboti biotehnici sau interactivi. Sunt răspânditi, în special, roboti programati
si mai putin, cei adaptivi. Robotii inteligenti se află în faza de încercări în laboratoare sau
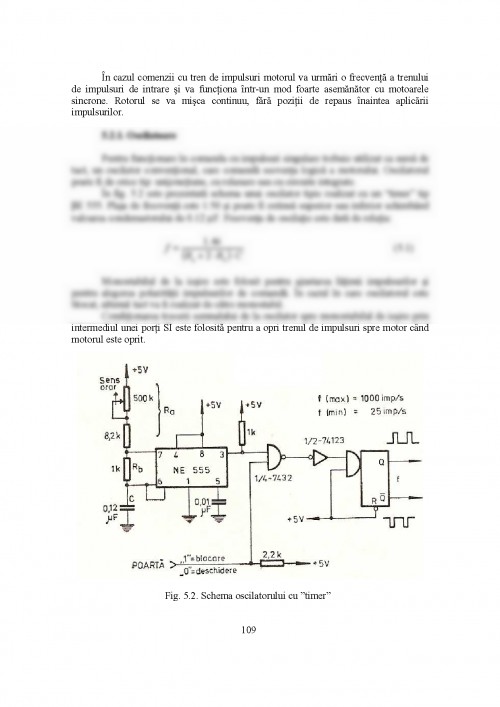
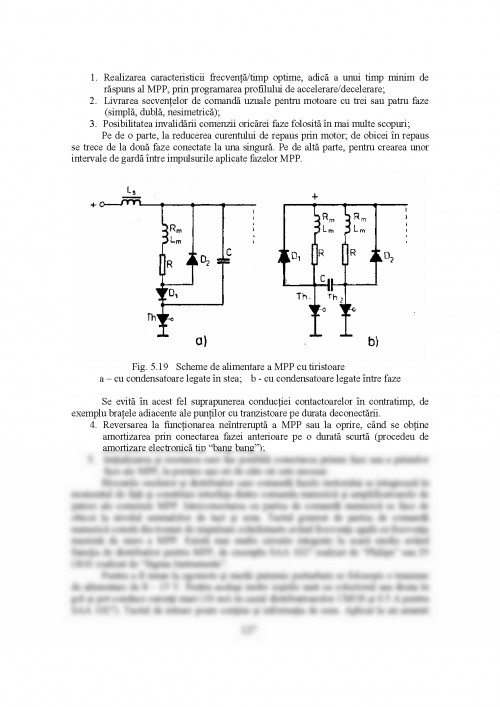
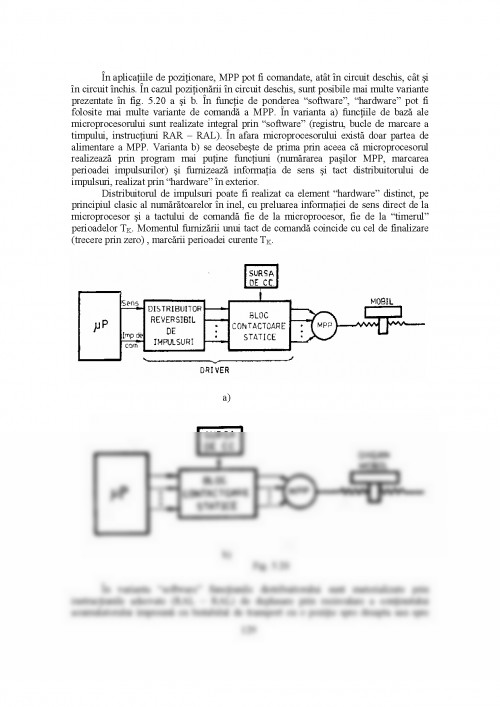
aplicatii la unele operatii de montaj automa
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.