
Introducere in Mecatronica
Contextul in care a aparut Mecatronica:
• Mutatii considerabile calitative si cantitative in evolutia societatii in ultimele decenii
• Aparitia unor noi domenii
• Generalizarea automatizarii proceselor de productie
• Integrarea robotilor autonomi cu capacitati senzoriale sporite
• Dezvoltarea inteligentei artificiale
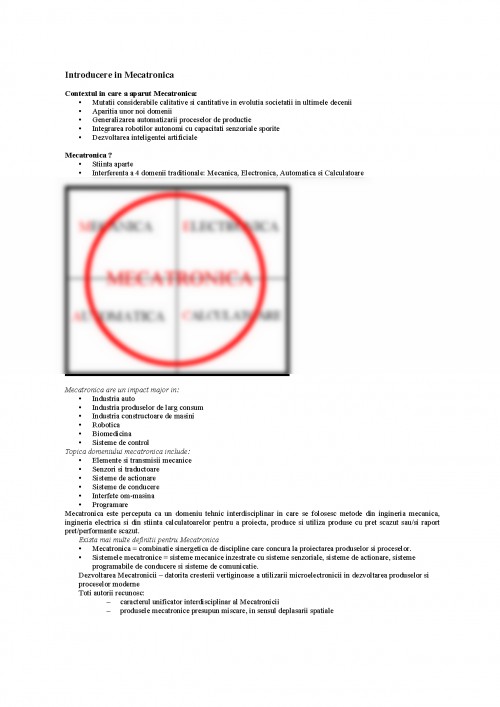
Mecatronica ?
• Stiinta aparte
• Interferenta a 4 domenii traditionale: Mecanica, Electronica, Automatica si Calculatoare
Mecatronica are un impact major in:
• Industria auto
• Industria produselor de larg consum
• Industria constructoare de masini
• Robotica
• Biomedicina
• Sisteme de control
Topica domeniului mecatronica include:
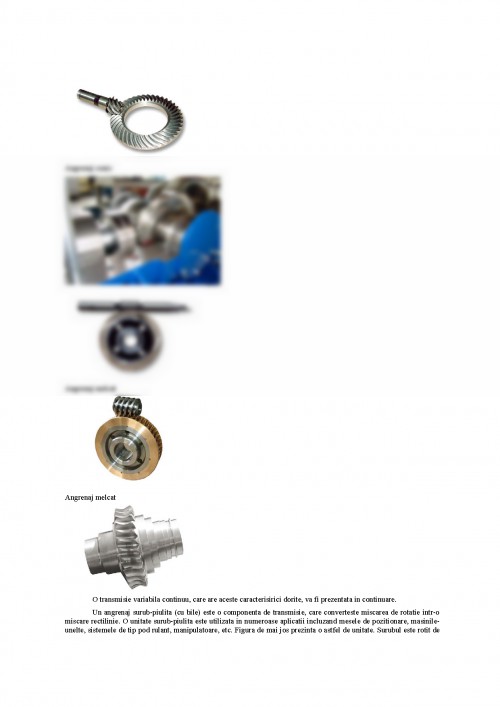
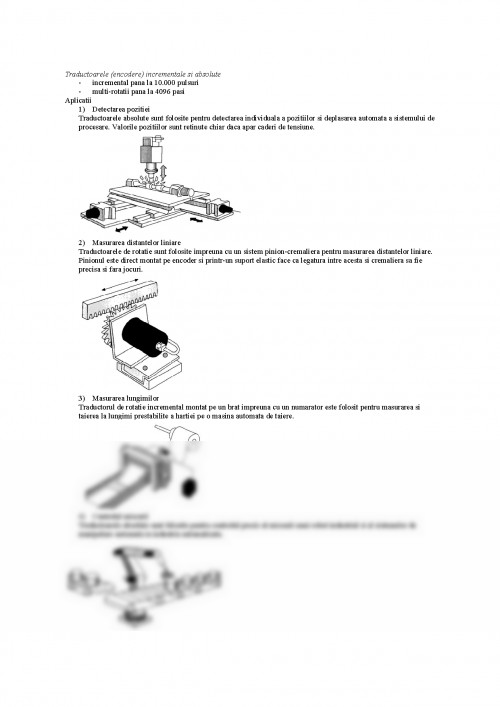
• Elemente si transmisii mecanice
• Senzori si traductoare
• Sisteme de actionare
• Sisteme de conducere
• Interfete om-masina
• Programare
Mecatronica este perceputa ca un domeniu tehnic interdisciplinar in care se folosesc metode din ingineria mecanica,
ingineria electrica si din stiinta calculatoarelor pentru a proiecta, produce si utiliza produse cu pret scazut sau/si raport
pret/performante scazut.
Exista mai multe definitii pentru Mecatronica
• Mecatronica = combinatie sinergetica de discipline care concura la proiectarea produselor si proceselor.
• Sistemele mecatronice = sisteme mecanice inzestrate cu sisteme senzoriale, sisteme de actionare, sisteme
programabile de conducere si sisteme de comunicatie.
Dezvoltarea Mecatronicii – datorita cresterii vertiginoase a utilizarii microelectronicii in dezvoltarea produselor si
proceselor moderne
Toti autorii recunosc:
– caracterul unificator interdisciplinar al Mecatronicii
– produsele mecatronice presupun miscare, in sensul deplasarii spatiale
MECANICA ELECTRONICA
AUTOMATICA CALCULATOARE
MECATRONICA
• Mecatronica presupune aplicarea celor mai moderne tehnici din ingineria mecanica de precizie, din electronica,
din automatica, din stiinta calculatoarelor si din inteligenta artificiala pentru a proiecta procese si produse
performante.
• Mecatronica presupune un echilibru intre nivelul teoretic al abordarii si nivelul practic al implementarii.
Sistemele de control ale sistemelor mecatronice sunt dependente de abilitatea de a:
• masura,
• reprezenta (codifica),
• comunica,
• interpreta (decodifica) si
• furniza (de exemplu afisa)
date referitoare la dinamica variabilelor care sunt implicate in proces.
Senzorii sistemelor mecatronice:
– Senzori care masoara interactiunea sistemelor mecatronice cu mediul lor de operare
– Senzori care masoara variabile interne sistemelor mecatronice
Subsistemul mecanic este partea sistemului mecatronic care asigura miscarea si la care se ataseaza senzori.
Senzorii convertesc informatia specifica in semnale electrice.
Subsistemul electronic converteste aceste semnale in format numeric pentru ca acestea sa poata fi folosite de
subsistemul de conducere.
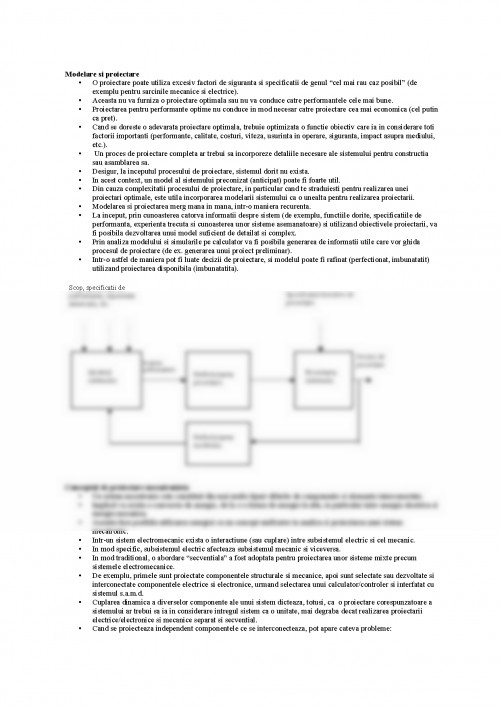
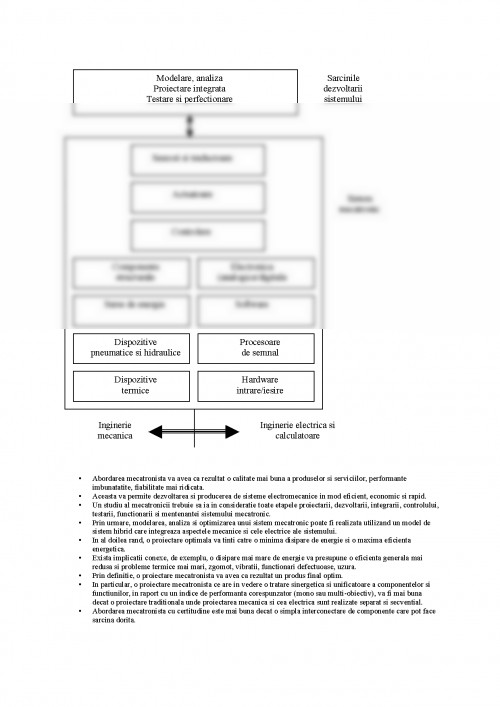
Domeniul Mecatronicii presupune aplicarea sinergetica a ingineriei mecanice, electronice, automaticii si
calculatoarelor in dezvoltarea sistemelor si produselor electromecanice printr-o abordare a proiectarii integrata.
Un sistem mecatronic cere o abordare multidisciplinara pentru proiectarea, dezvoltarea si implementarea sa.
In dezvoltarea traditionala a unui sistem electromecanic, componentele mecanice si cele electrice sunt proiectate
sau selectate separat si apoi integrate, posibil cu alte componente, hardware si software.
In contrast, in abordarea mecatronista, intregul sistem electromecanic este tratat concurential, intr-o maniera
integrata, de catre o echipa multidisciplinara de ingineri.
• In mod natural, un sistem format prin interconectarea unui set de componente proiectate si realizate
independent, nu va produce acel nivel de performanta ca un sistem mecatronic, care implica o abordare integrata
asupra proiectarii, dezvoltarii si implementarii.
• Cea mai buna potrivire si compatibilitate intre functiunile componentelor poate fi realizata printr-o abordare
unificata si integrata asupra proiectarii si dezvoltarii, si de asemenea cea mai buna functionare este posibila
printr-o implementare integrata.
In general, un produs mecatronic va fi mai eficient, obtinut cu costuri mai mici, fiabil, flexibil si functional, si din
punct de vedere mecanic mai putin complex, comparativ cu un produs nemecatronic pentru care a fost nevoie de eforturi
similare in realizarea sa.
• Performantele unui sistem nemecatronic pot fi imbunatatite printr-un control sofisticat, care este realizat cu
costuri aditionale pentru senzori, instrumentatie, hardware si software de control.
• Produsele si sistemele mecatronice moderne includ automobilele si avioanele, dispozitivele electrocasnice
inteligente, robotii medicali, vehiculele spatiale.
SISTEME MECATRONICE
• Un sistem mecatronic tipic contine un “schelet” mecanic, senzori, actuatori, controlere, dispozitive de prelucrare
semnale, hardware digital/calculator, software, dispozitive de interfatare si surse de putere.
• De exemplu, un servomotor, care este un motor cu capacitatea de feedback senzorial pentru generarea cu
acuratete a miscarilor complexe este constituit din componente mecanice, electrice si electronice.
• Componentele mecanice principale sunt rotorul si statorul.
• Componentele electrice includ infasurarile de camp si infasurarile rotorice (daca sunt prezente), circuitul pentru
transmisia de putere si comutatie (daca este necesar).
• Componentele electronice le includ pe cele necesare pentru achizitia si prelucrarea marimilor senzoriale (de
exemplu encoder optic pentru deplasari, si tahometru pentru viteza).
• Proiectarea generala a unui servomotor poate fi imbunatatita printr-o abordare mecatronista.
• Robotul humanoid ASIMO (Honda) este un sistem mecatronic mai complex si “inteligent”.
• El presupune mai multe servomotoare si o varietate de componente mecatronice.
• O abordare mecatronista poate fi mult mai benefica pentru proiectarea si dezvoltarea unui sistem electromecanic
complex.
• Proiectarea unui sistem mecatronic presupune proiectarea si integrarea simultana a tuturor componentelor.
• O astfel de proiectare “concurenta” si integrata are nevoie de o abordare noua a insusi procesului de proiectare
si, de asemenea, o considerare formala a transferului de informatie si energie intre componentele sistemului.
Un curs de baza despre principalele componente si aplicatii ale sistemelor mecatronice
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.