
2. IDENTIFICAREA SISTEMELOR
2.1 Consideraii generale cu privire la instalaiile automate
#n ultimele decenii, instalaiile industriale au cunoscut o dezvoltare
considerabil[, ceea ce a condus la realizarea unor sisteme de conducere
corespunz[toare.
Impedimentul major @n realizarea unei conduceri calitativ superioare a unor
instalaii industriale complexe este reprezentat @n primul r`nd de imposibilitatea
stabilirii prin metode analitice at`t a modelului lor dinamic, c`t ]i a celui
staionar. Acest lucru se explic[ prin aceea c[ fenomenele care se desf[]oar[ @n
instalaiile industriale sunt extrem de complicate, iar @n multe cazuri nu se poate
p[trunde suficient @n intimitatea lor, astfel @nc`t modelul stabilit pe cale analitic[
s[ reprezinte cel puin satisf[c[tor realitatea fizic[.
Un alt aspect legat de problema conducerii instalaiilor complexe const[ @n
aceea c[ modelul lor nu este constant @n raport cu condiiile de funcionare.
Aceasta @nseamn[ c[ chiar dac[ ar putea fi stabilit prin metode pur analitice,
modificarea sa @n timpul funcionarii necesit[ obinerea unor informaii curente cu
privire la structura sa, astfel @nc`t s[ se poat[ interveni @n mod corespunz[tor @n
sistemul de conducere pentru a putea asigura performanele impuse. Din cele de
mai sus rezult[ necesitatea cunoa]terii unor metode care, utiliz`nd rezultatele unor
m[sur[tori efectuate asupra instalaiei studiate, s[ permit[ stabilirea unui model al
acesteia c`t mai aproape de cel real. Aceasta constituie @n esen[ problema
identific[rii.
2.2 Conceptul de identificare
S[ presupunem c[ instalaia al c[rei model trebuie stabilit este descris[ de
urm[toarea ecuaie diferenial[ stochastic[:
(2.1)
. x= f(x, u,w, p, t)
unde: x - reprezint[ starea sistemului;
u - reprezint[ m[rimea de intrare;
w - zgomotul care afecteaz[ intrarea;
p - parametrii (@n general necunoscui);
1
t - variabila independent[ (timpul).
Presupunem c[ instalaia ofer[ prin dispozitivul de masur[ a st[rii, la ie]ire,
o m[rime de forma:
z = h(x, u,w, p, v, t) (2.2)
unde: h - este o funcie specific[ dispozitivului de m[sur[;
v - reprezint[ zgomotul care afecteaz[ procesul de m[surare.
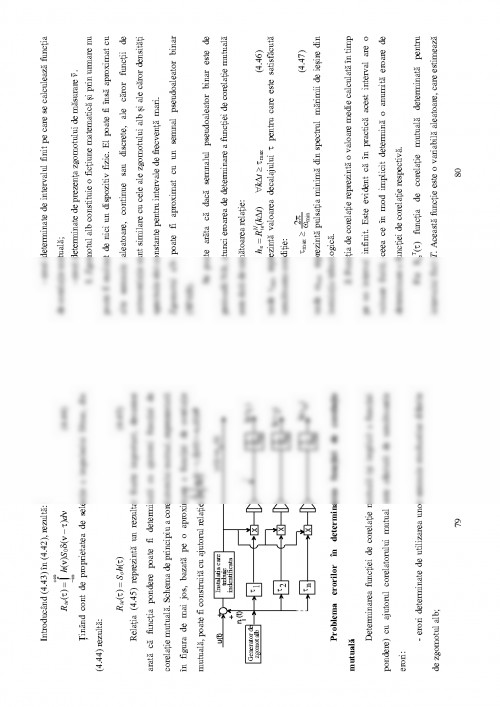
Problema identific[rii cuprinde dou[ etape:
I - adoptarea unei ecuaii care s[ fie c`t mai apropiat[ de cea exact[ (ecuaia
(2.1));
II - determinarea vectorului p al coeficienilor necunoscui ai modelului propus m
@n etapa I.
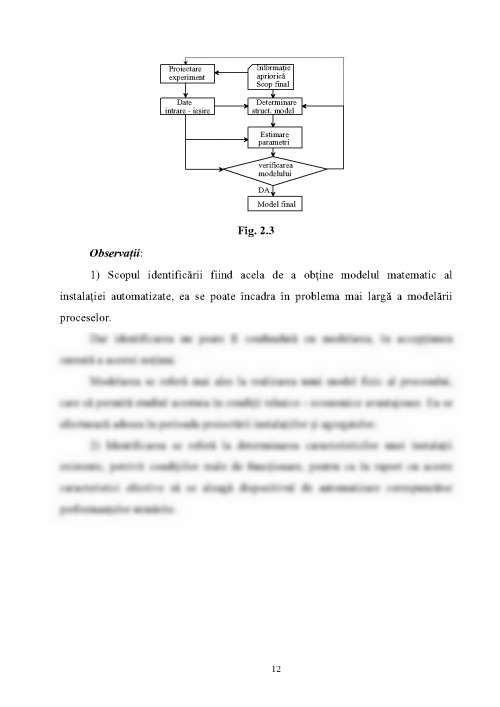
Schematic problema identific[rii se poate reprezenta astfel:
informaii cu
privire la zgomot
u x
w
x=f(x,u,w,p,t)
Dispozitiv
de masur[
Dispozitiv
de masur[
Algoritm de
identificare
Inst. de identificat
.
p
m
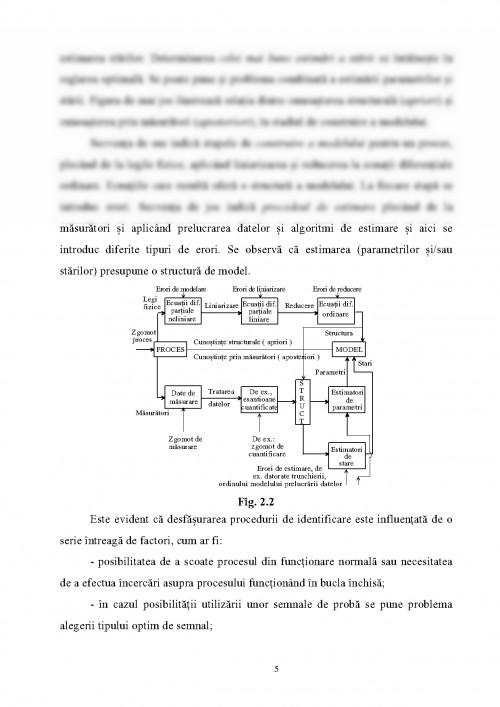
Fig. 2.1
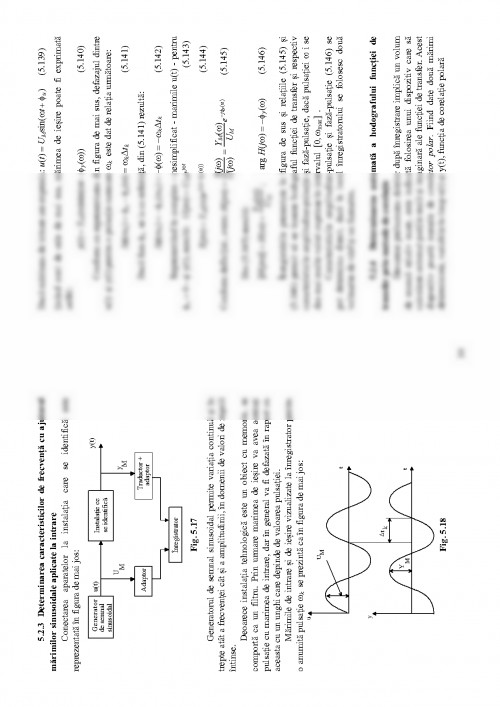
Analiza sistemelor, ca problematic[ general[, se ocup[ de studiul evoluiei
semnalului de ie]ire, determinat at`t de variaia m[rimilor de intrare, c`t ]i de
propriet[ile acestuia.
Cursul se face in anul IV la Facultatea de Automatica, Calculatoare si Electronica de catre dl. prof. univ. dr. ing. Eugen Bobasu.
Contine cursurile editate cu diacritice si cu formule in format PDF si in format SAM (AmiPro).
Din el se poate face orice referat sau lucrare de diploma referitoare la sisteme liniare si neliniare.
Documentul este oferit gratuit,
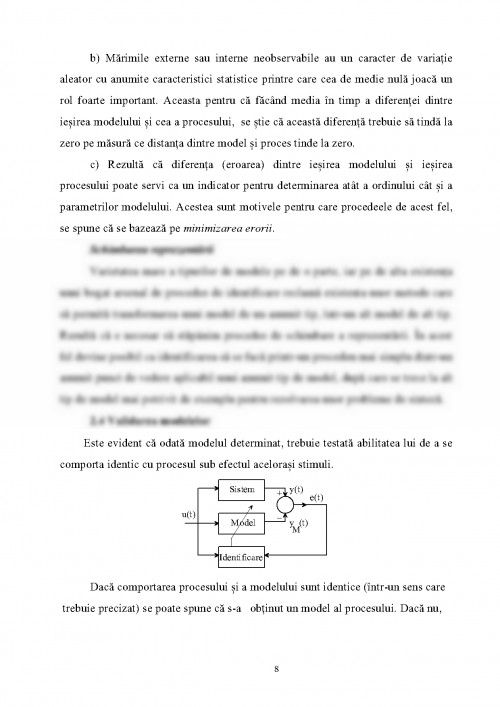
trebuie doar să te autentifici in contul tău.