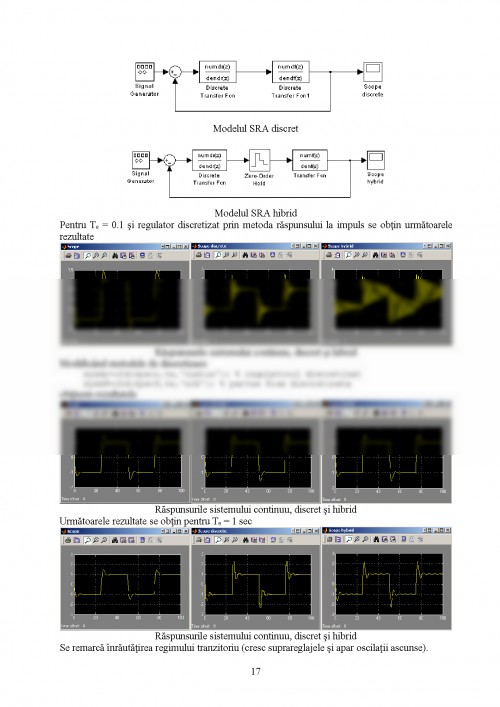
Discretizarea sistemelor continue
1. Sisteme de reglare continuale
Sistemele automate moderne combină în bucla de reglare dispozitive pur numerice (calculatorul de proces, microcontrollerul) cu dispozitive continuale (care au mărimi de intrare şi de ieşire funcţii continuale, definite la orice moment de timp şi reprezentate prin funcţii analitice f(t)).
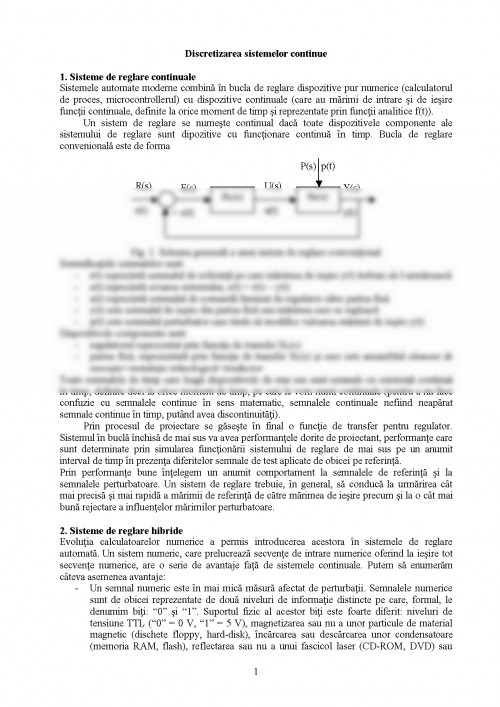
Un sistem de reglare se numeşte continual dacă toate dispozitivele componente ale sistemului de reglare sunt dipozitive cu funcţionare continuă în timp. Bucla de reglare convenională este de forma
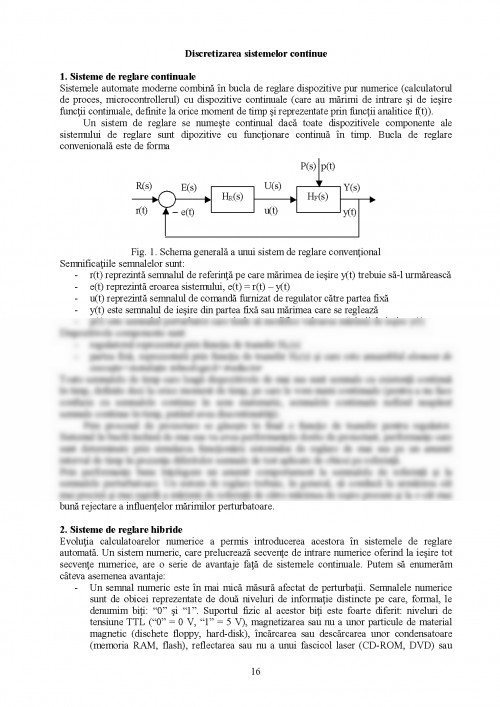
Fig. 1. Schema generală a unui sistem de reglare convenţional
Semnificaţiile semnalelor sunt:
- r(t) reprezintă semnalul de referinţă pe care mărimea de ieşire y(t) trebuie să-l urmărească
- e(t) reprezintă eroarea sistemului, e(t) = r(t) – y(t)
- u(t) reprezintă semnalul de comandă furnizat de regulator către partea fixă
- y(t) este semnalul de ieşire din partea fixă sau mărimea care se reglează
- p(t) este semnalul perturbator care tinde să modifice valoarea mărimii de ieşire y(t)
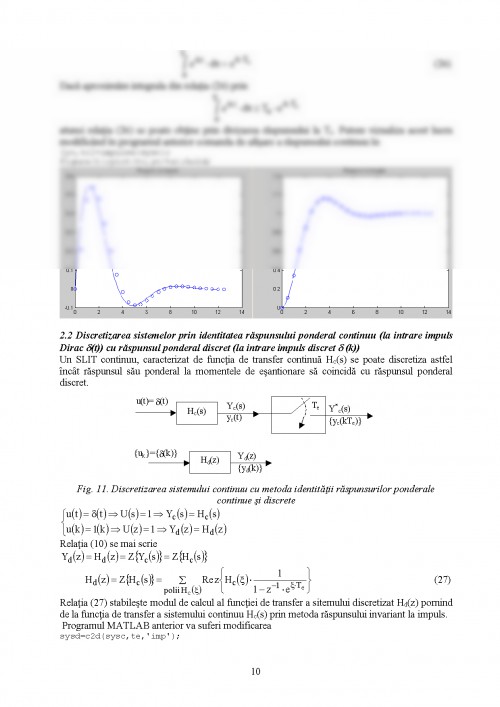
Dispozitivele componente sunt:
- regulatorul reprezentat prin funcţia de transfer HR(s)
- partea fixă, reprezentată prin funcţia de transfer HF(s) şi care este ansamblul element de execuţie+instalaţie tehnologică+traductor
Toate semnalele de timp care leagă dispozitivele de mai sus sunt semnale cu existenţă continuă în timp, definite deci la orice moment de timp, pe care le vom numi continuale (pentru a nu face confuzie cu semnalele continue în sens matematic, semnalele continuale nefiind neapărat semnale continue în timp, putând avea discontinuităţi).
Prin procesul de proiectare se găseşte în final o funcţie de transfer pentru regulator. Sistemul în buclă închisă de mai sus va avea performanţele dorite de proiectant, performanţe care sunt determinate prin simularea funcţionării sistemului de reglare de mai sus pe un anumit interval de timp în prezenţa diferitelor semnale de test aplicate de obicei pe referinţă.
Prin performanţe bune înţelegem un anumit comportament la semnalele de referinţă şi la semnalele perturbatoare. Un sistem de reglare trebuie, în general, să conducă la urmărirea cât mai precisă şi mai rapidă a mărimii de referinţă de către mărimea de ieşire precum şi la o cât mai bună rejectare a influenţelor mărimilor perturbatoare.
2. Sisteme de reglare hibride
Evoluţia calculatoarelor numerice a permis introducerea acestora în sistemele de reglare automată. Un sistem numeric, care prelucrează secvenţe de intrare numerice oferind la ieşire tot secvenţe numerice, are o serie de avantaje faţă de sistemele continuale. Putem să enumerăm câteva asemenea avantaje:
- Un semnal numeric este în mai mică măsură afectat de perturbaţii. Semnalele numerice sunt de obicei reprezentate de două niveluri de informaţie distincte pe care, formal, le denumim biţi: “0” şi “1”. Suportul fizic al acestor biţi este foarte diferit: niveluri de tensiune TTL (“0” = 0 V, “1” = 5 V), magnetizarea sau nu a unor particule de material magnetic (dischete floppy, hard-disk), încărcarea sau descărcarea unor condensatoare (memoria RAM, flash), reflectarea sau nu a unui fascicol laser (CD-ROM, DVD) sau emiterea sau nu a unui fascicol luminos (transmisia pe fibră optică). Indiferent de suportul fizic, informaţia este una de nivel (“low” sau “high”). În mod normal este mult mai greu de alterat un nivel pentru a-l face de nerecunoscut decât informaţia temorală conţinută de un semnal analogic.
- Un semnal numeric este mult mai uşor de stocat pe diferite suporturi
- Un semnal numeric este mult mai uşor de prelucrat matematic cu ajutorul unui sistem de calcul. Atât analiza unui semnal numeric cât şi sinteza sa se fac mult mai uşor decât în cazul unui semnal continuu
- Un semnal numeric este mult mai uşor transmis la distanţă (cablu electric, fibră optică, unde electromagnetice (wireless)).
- Un semnal numeric este mult mai uşor reprezentat grafic (pe display, plotter, imprimantă)
Este evidentă cauza pentru care se preferă astăzi aproape în exclusivitate introducerea dispozitivelor numerice de conducere.
Sistemul de reglare continual se va transforma în:
Fig. 2. Sistem hibrid de reglare (combinaţie intre un sistem discret şi unul continuu)
Problemele care se pun sunt:
1. Ce legătură există între E(s) şi E(z) ?
2. Ce legătură există între HR(s) şi HR(z) ?
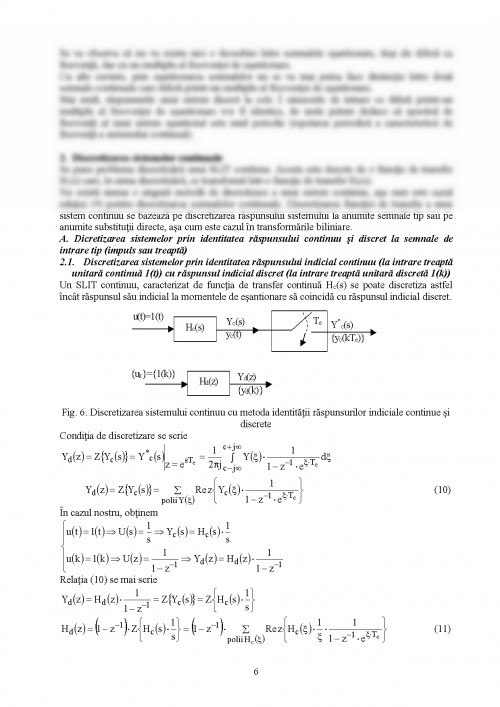
1. Discretizarea semnalelor continuale
Pentru a stabili legătura dintre transformata Z a semnalului eşantionat şi transformata Laplace a semnalului continual se procedează astfel:
a. se modelează fenomenul de eşantionare prin multiplicare cu o serie de impulsuri Dirac, conform proprietăţilor semnalelor de tip distribuţie.
Fie un semnal continuu u(t). Aplicat la intrarea unui CAN, la ieşire vom obţine o secvenţă numerică {u(n)}
Fig. 3. CAN. Discretizarea unui semnal continual
Definim următoarele semnale
(1)
Se observă că primul semnal este un semnal discret, o secvenţă de numere, reprezentat de eşantioanele culese la momente de timp egal distribuite, multiplu al perioadei de eşantionare Te. Al doilea semnal este de fapt o distribuţie, nu o funcţie în sensul obişnuit.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.