Introducere
Sisteme de control distribuit. Concepte de baza
Notiunea de sistem de control distribuit (sau DCS - Distributed Control
System) desemneaza, în sens foarte larg, orice sistem de control al unui proces
dinamic, caracterizat prin faptul ca elementele de control sunt localizate spatial în
vecinatatea subsistemelor controlate si sunt interconectate într-o retea de
comunicatie, care permite monitorizarea si supervizarea procesului.
SCADA este un acronim pentru Supervisory Control and Data Acquisition -
sistem de control la nivel de supervizare si achizitie de date.
Controlul la nivel de supervizare este definit în opozitie cu controlul în timp
real si consta de exemplu în modificarea valorilor prescrise (set-point values) ale
unor regulatoare inteligente, a caror sarcina este sa mentina (în timp real) valorile
masurate ale unor parametri de proces la nivele cât mai apropiate de valorile
prescrise.
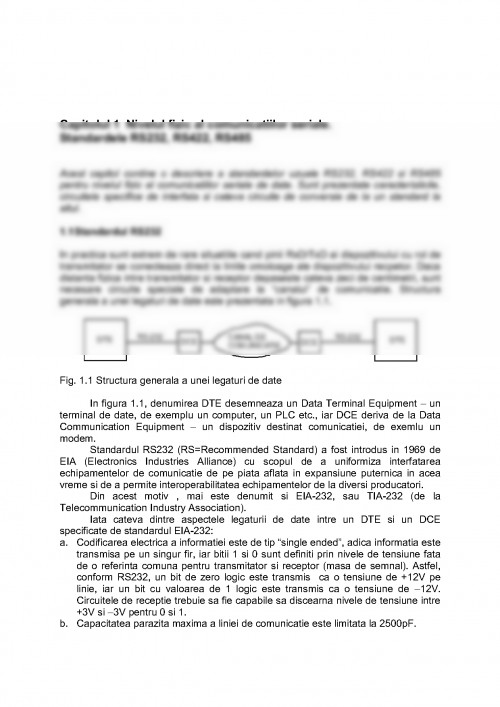
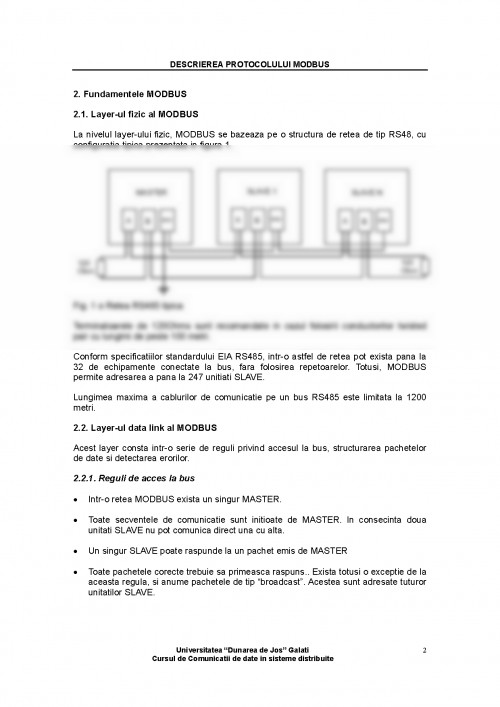
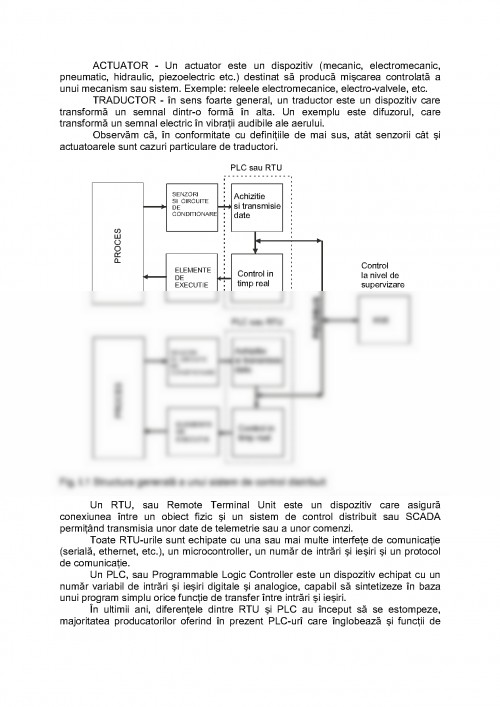
Schita generala a unui sistem de control distribuit cu supervizare SCADA este
prezentata în figura I.1. Observam prezenta mai multor instalatii tehnologice
(procese) distincte, fiecare având dispozitive de prelevare si transmisie a datelor
masurate (senzori, circuite de conditionare si transmisie), elemente de executie
(pompe, motoare, incalzitoare etc.) elemente de control în timp real (de obicei PLCurî,
controllere PID “inteligente”, sau RTU-uri), toate interconectate pe un bus de
comunicatie cu un punct central de monitorizare si supervizare echipat cu un
dispozitiv HMI (Human-Machine Interface) - de obicei un computer echipat cu un
software special de comunicatie si control.
Un exemplu practic de astfel de sistem este cazul unor rezervoare din
industria chimica, echipate cu sisteme de control al temperaturii, nivelelor si debitelor
de admisie si de evacuare.
Controlul de tip supervizare are în vedere stabilirea temperaturilor si nivelelor
prescrise pentru fiecare subsistem, precum si momentele când se comanda
umplerea sau golirea rezervoarelor.
De notat faptul ca anumiti parametri pot fi transmisi direct catre computerul
din camera de control prin intermediul unor dispozitive denumite RTU (Remote
Terminal Units). Acestea pot transmite si comenzi catre PLC-urile sau direct catre
elementele de executie aferente nivelului de control în timp real al procesului,
comenzi care, uneori, au prioritate fata de comenzile provenind de la bucla locala de
control în timp real.
SENZOR - Un senzor este un dispozitiv care masoara o marime fizica sau
chimica si o converteste într-un semnal care poate fi citit de un observator sau de un
instrument. Exemplu - termometrul.
ACTUATOR - Un actuator este un dispozitiv (mecanic, electromecanic,
pneumatic, hidraulic, piezoelectric etc.) destinat sa produca miscarea controlata a
unui mecanism sau sistem. Exemple: releele electromecanice, electro-valvele, etc.
TRADUCTOR - în sens foarte general, un traductor este un dispozitiv care
transforma un semnal dintr-o forma în alta. Un exemplu este difuzorul, care
transforma un semnal electric în vibratii audibile ale aerului.
Observam ca, în conformitate cu definitiile de mai sus, atât senzorii cât si
actuatoarele sunt cazuri particulare de traductori.
PROCES PROCES
Achizitie
si transmisie
date
Achizitie
si transmisie
date
Control in
timp real
Control in
timp real
PLC sau RTU
PLC sau RTU HMI
Control
la nivel de
supervizare
FIELDBUS
SENZORI
SI CIRCUITE
DE
CONDITIONARE
SENZORI
SI CIRCUITE
DE
CONDITIONARE
ELEMENTE
DE
EXECUTIE
ELEMENTE
DE
EXECUTIE
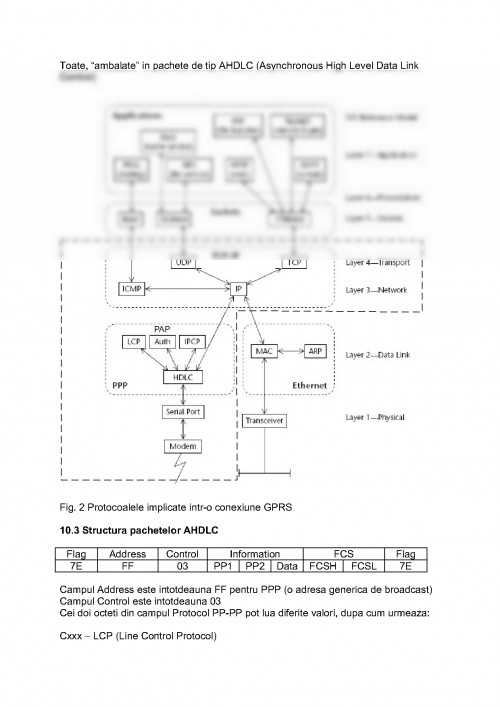
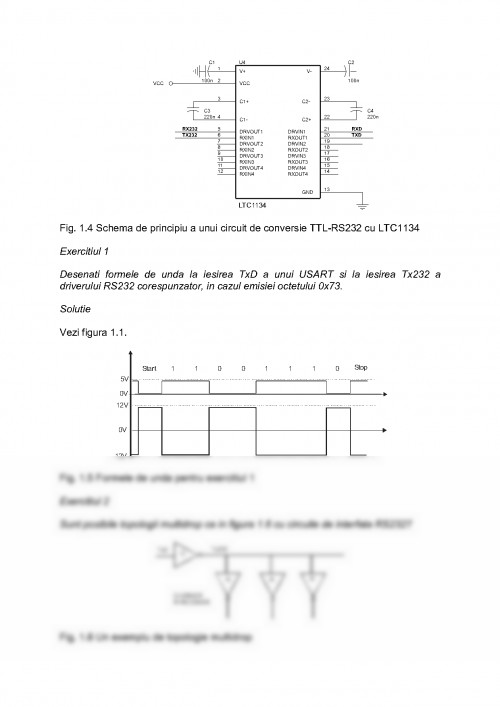
Fig. I.1 Structura generala a unui sistem de control distribuit
Un RTU, sau Remote Terminal Unit este un dispozitiv care asigura
conexiunea între un obiect fizic si un sistem de control distribuit sau SCADA
permitând transmisia unor date de telemetrie sau a unor comenzi.
Toate RTU-urile sunt echipate cu una sau mai multe interfete de comunicatie
(seriala, ethernet, etc.), un microcontroller, un numar de intrari si iesiri si un protocol
de comunicatie.
Un PLC, sau Programmable Logic Controller este un dispozitiv echipat cu un
numar variabil de intrari si iesiri digitale si analogice, capabil sa sintetizeze în baza
unui program simplu orice functie de transfer între intrari si iesiri.
În ultimii ani, diferentele dintre RTU si PLC au început sa se estompeze,
majoritatea producatorilor oferind în prezent PLC-urî care înglobeaza si functii de
comunicare specifice RTU si RTU-urî cu cu facilitati de programare la nivelul
utilizatorului similare cu PLC-urile.
De retinut, totusi, ca în cazul RTU, accentul este pe comunicatie, în timp ce, în
cazul PLC, principala functie este cea de control.
HMI - Human Machine Interface - este o componenta software a sistemelor
SCADA, având urmatoarele functii:
a. Sa prezinte datele achizitionate din proces într-o forma sintetica si usor de
citit de un operator uman.
b. Sa permita asocierea grafica a diverselor componente ale instalatiilor
tehnologice cu diversi parametri de stare curenta asociati cu acestea.
c. Sa genereze rapoarte complexe privind istoricul procesului si uneori chiar
rapoarte cu caracter economic (volumul productiei, gradul de incarcare a utilajelor,
etc.)
SIGNAL CONDITIONER - Un dispozitiv plasat între sursa de semnal si un
aparat de masura sau control, care face o adaptare între cele doua dispozitive.
Exemple: atenuatoarele, amplicatoare, dispozitive care compenseaza neliniaritatile,
convertoare tensiune-curent.
Termenul Field bus, sau Fieldbus desemneaza o retea industriala, în care
coexista dispozitive de masura si de control/supervizare , care comunica digital între
ele. Modul în care se desfasoara comunicatia între diversele echipamente conectate
la un fieldbus, este definit protocolul de comunicatie al sistemului distribuit.
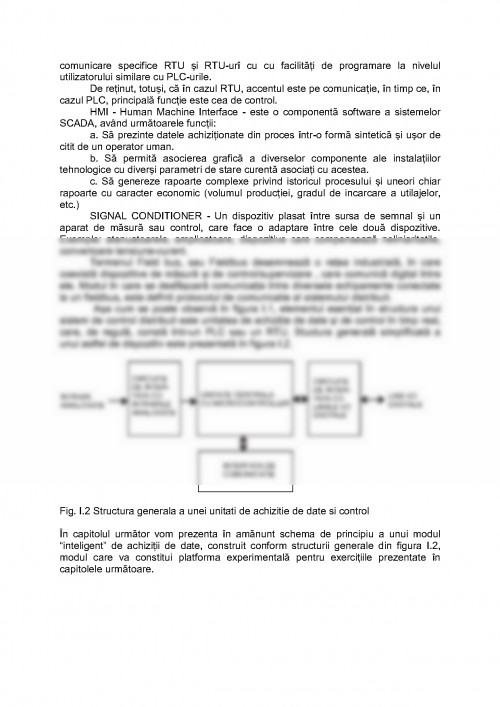
Asa cum se poate observa în figura I.1, elementul esential în structura unui
sistem de control distribuit este unitatea de achizitie de date si de control în timp real,
care, de regula, consta într-un PLC sau un RTU. Stuctura generala simplificata a
unui astfel de dispozitiv este prezentata în figura I.2.
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.