

SISTEME NELINIARE
1. Conceptul de sistem neliniar. Tipuri de neliniaritati
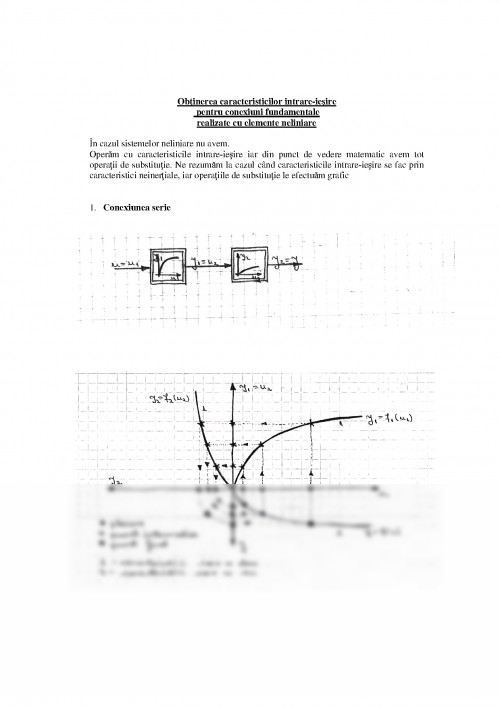
Conceptul de sistem neliniar
Un sistem este neliniar atunci cand pentru acel sistem nu este valabil principiul
superpozitiei in raport cu marimile de intrare sau in raport cu conditiile initiale.
Matematic spunem ca un sistem este neliniar daca cel putin una dintre ecuatiile care
intra in componenta MM este neliniara.
Operarea cu sisteme neliniare comporta dificultati de calcul, din acest motiv sistemele
neliniare sunt grupate din punct de vedere matematic pe clase de sisteme neliniare
elaborandu-se metode de calcul pentru diverse clase in parte. Pe de alta parte in practica se
cauta sa se ocoleasca dificultatile matematice aproximand modelele neliniare cu modele
liniare. Operatia poarta numele de operatie de liniarizare, nu este posibila intotdeauna si
atunci cand este posibila rezultatul este valabil intr-o anume vecinatate a marimilor.
De regula liniarizarea se practica in sistemele de reglare in care marimile trebuie sa se
incadreze prin insasi problema de reglare in intervale relativ inguste.
Din punct de vedere al posibilitatilor de liniarizare se deosebesc:
- neliniaritati esentiale care au puncte în vecinatatea carora nu pot fi liniarizate.
- neliniaritati neesentiale care pot fi liniarizate în vecinatatea fiecarui punct de
functionare.
Din punct de vedere a modului în care în sistemele din practica apar neliniaritati,
distingem doua categorii:
- neliniaritati intrinseci adica neliniaritati neintroduse de om si care exista datorita
naturii
- neliniaritati intentionate care sunt introduse de om cu diferite scopuri.
Sistemele din natura sunt in principal neliniare. De asemenea majoritatea sistemelor
practice de conducere sunt tot neliniare. Cazul linear este un caz de regula teoretic util
pentru a proiecta sisteme cu comportare dorita la mici variatii ale marimii de intrare. Pe de
alta parte furnizeaza un prim mod de a gândi pentru problemele practice, rezultatele fiind
apoi adaptate si modificate corespunzator comportarii neliniare.
Tipuri de neliniaritati
Neliniaritati esentiale
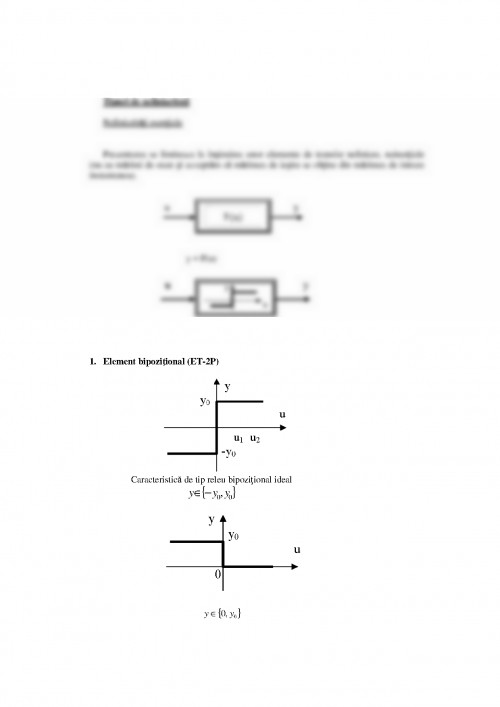
Prezentarea se limiteaza la însiruirea unor elemente de transfer neliniare, neinertiale
(nu au marimi de stare si acceptam ca marimea de iesire se obtine din marimea de intrare
instantaneu).
y = F(u)
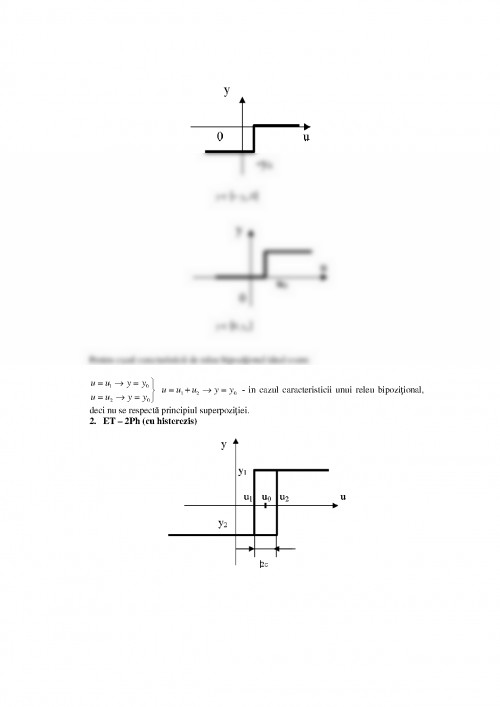
1. Element bipozitional (ET-2P)
Caracteristica de tip releu bipozitional ideal
Pentru cazul caracteristicii de releu bipozitional ideal avem:
u = u1 + u2 ® y = y0 - in cazul caracteristicii unui releu bipozitional,
deci nu se respecta principiul superpozitiei.
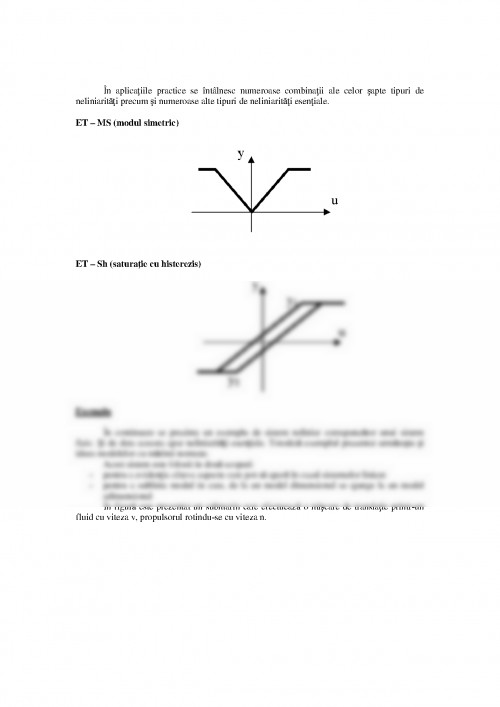
2. ET – 2Ph (cu histerezis)
Documentul este oferit gratuit,
trebuie doar să te autentifici in contul tău.