
Flexibilitatea, fiabilitatea, insensibilitatea la perturbatii precum si o serie de cerinte privind facilitatile oferite la introducerea sau la modificarea programelor de lucru sunt cateva din caracteristicile de baza ce se impun la ora actuala echipamentelor de conducere pentru majoritetea aplicatiilor ce utilizeaza robotii industriali.Intr-o mare masura,aceste cerinte sunt acoprite de automate programabile.
Un automat programabil este un sistem specializat destinat pentru tratarea problemelopr de logica secventiala si combinationala,simuland structurile logice de comanda printr-o configuratie elastica programabila. Prin conceptia sa ,un automat programabil este adaptabil pentru functionarea in mediul industrial,poate opera intr-o plaja larga de temperatura si umiditate, este usor adaptabil la interfatarea cu orice proces si nu pune probleme deosebite privind formarea personalului de deservire datorita facilitatilor de programare oferite. Toate aceste caracteristici, la care se mai pot addauga robustetea generala a echipamentului si pretul de cost relativ redus, fac ca automatele programabile sa constituie o pondere importanta in sistemele de conducere ale masinilor unelte si robotilor industriali.
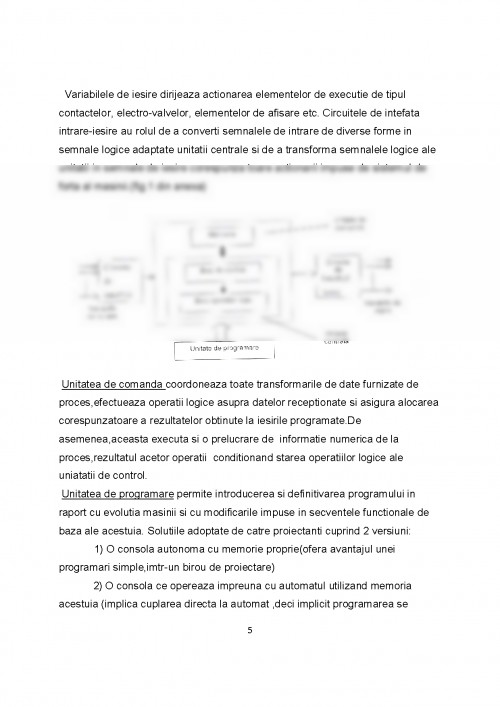
Arhitectura generala a unui automat programabil este desfasurata in jurul unei magistrale e date la care sunt conectate circuitele de intrare-iere, unitatea centrala si memeoria sistemului.
Variabilele de intrare sunt realizate sub forma diverselor elemente de comanda si masurare incluse in sistemele operationale si auxiliare ale robotilor: limitatore de pozitie, marimi mecanice de la traductoarele de deplasare incrementale sau absolute sau chiar de la sisteme de masurare analogica dupa o conversie analog numerica.
Variabilele de iesire dirijeaza actionarea elementelor de executie de tipul contactelor, electro-valvelor, elementelor de afisare etc. Circuitele de intefata intrare-iesire au rolul de a converti semnalele de intrare de diverse forme in semnale logice adaptate unitatii centrale si de a transforma semnalele logice ale unitatii in semnale de iesire corespunza toare actionarii impuse de sistemul de forta al masinii.(fig.1 din anexa)
Unitatea de comanda coordoneaza toate transformarile de date furnizate de proces,efectueaza operatii logice asupra datelor receptionate si asigura alocarea corespunzatoare a rezultatelor obtinute la iesirile programate.De asemenea,aceasta executa si o prelucrare de informatie numerica de la proces,rezultatul acetor operatii conditionand starea operatiilor logice ale uniatatii de control.
Unitatea de programare permite introducerea si definitivarea programului in raport cu evolutia masinii si cu modificarile impuse in secventele functionale de baza ale acestuia. Solutiile adoptate de catre proiectanti cuprind 2 versiuni:
1) O consola autonoma cu memorie proprie(ofera avantajul unei programari simple,imtr-un birou de proiectare)
2) O consola ce opereaza impreuna cu automatul utilizand memoria acestuia (implica cuplarea directa la automat ,deci implicit programarea se realizeaza nemijlocit in intimitatea procesului tehnologic condus)
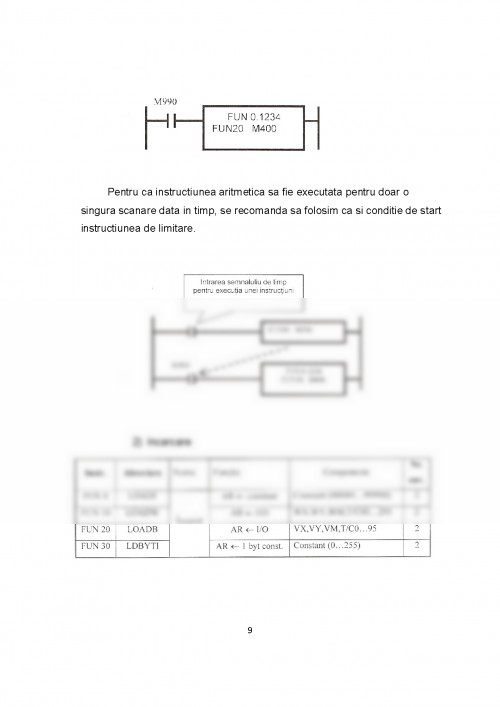
Unitatea centrala este in principiu o unitate logica capabila sa interpreteze un numar mic de instructiuni care exprima functiile de baza intr-un proces
de conducere: instructiuni de evaluare a unor instructiuni boleene cu
pastrarea rezultatului la o variabila de memorie sau la o iesire,scadere,comparatie etc.De asemenea pot fi utilizate instructiuni de salt conditionat ,instructiuni de subrutina si instructiuni de indexare.
Executarrea instructiunilor este ciclica ceea ce determina o simplificare considerabila a structurii logice interne si evita introducerea unui sistem de intreruperi prioritare. Tinand cont de constantele de timp proprii actionarii robotilor industriali se impune ca timpul de baleiaj al unui program de conducere sa fie inferior celei mai mici constante de timp. In acest fel se asigura preluarea tuturor informatii lor privind elementele semnificative ale miscarii si interpretarea lor imediata. Memoria automatelor programabile stocheaza programe de date si este in general
Tehnologii si sisteme de fabricatie utiliyate in mecatronica", autor: prof. Dr. Ing. Octavian Dontu, Editura ,,Printec" 2003;
2. ,,Mecatronica" - Manual pentru clasa a XII-a, autor: Robe Mariana S.A., Editura Economica ,,Preuniversitaria" 2006;
3. ,,Fabricatia asistata de calculator", autor: Miron Zapciu, Editura ,,Politehnica Press"
4. ,,Curs Teorie Mecatronica", Editura ,,Terra Impex SRL" 2007
Pentru a descărca acest document,
trebuie să te autentifici in contul tău.